上一讲叙述了点云模型的调平工作
大家可以发现在调平模型的时候,基本都使用了姿态反转这个操作(pose_invert)
本文详细描述点云模型姿态调正的细节,并与矩阵形式调整点云模型姿态做对比
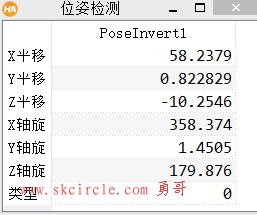
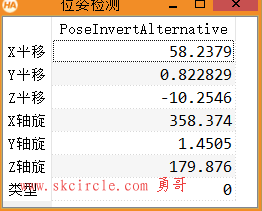
一.对姿态进行翻转
用姿态调整点云
这里介绍一个自己调整点云模型位姿的方式
二.用矩阵形式对点云模型姿态调整
,
用矩阵调整点云
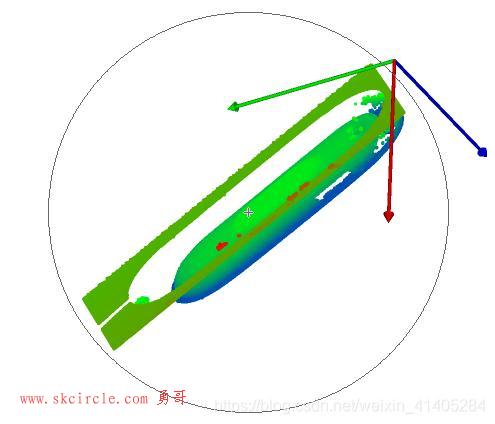
姿态翻转前
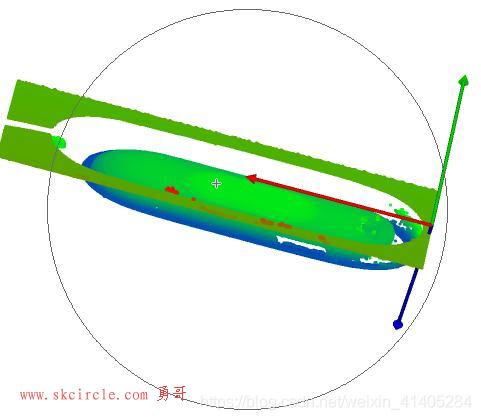
姿态翻转后
转载自:
https://blog.csdn.net/weixin_41405284/article/details/107140557
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。
Powered By Z-BlogPHP 1.7.3
Copyright www.skcircle.com Rights Reserved.