1.首先对点云以高度方向初步去噪
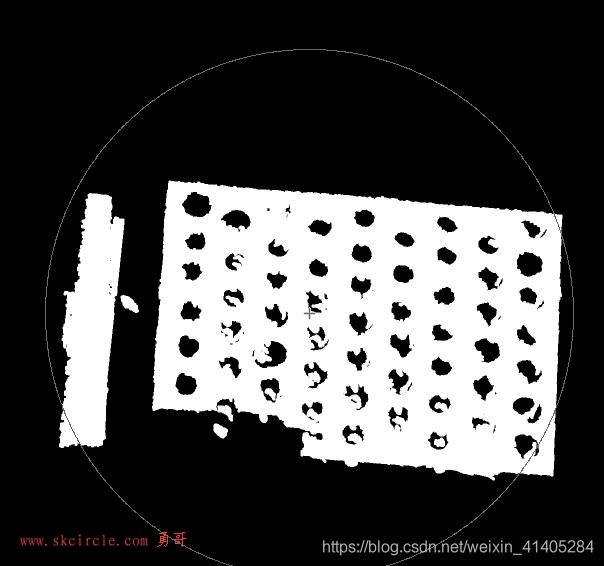
2.点云数据信息提取
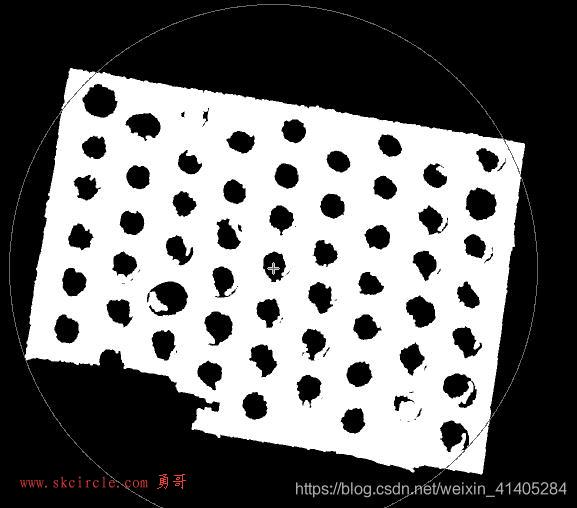
对于物料点云的长宽高的判别,最常用的手法是最最小外接矩形,通过获取最小外接矩形的L1,L2,L3,来确定点云的位置。
也可以通过一下算子求得点云信息
更正点云分割算子的参数含义
//将4mm内的点云作为一个区域
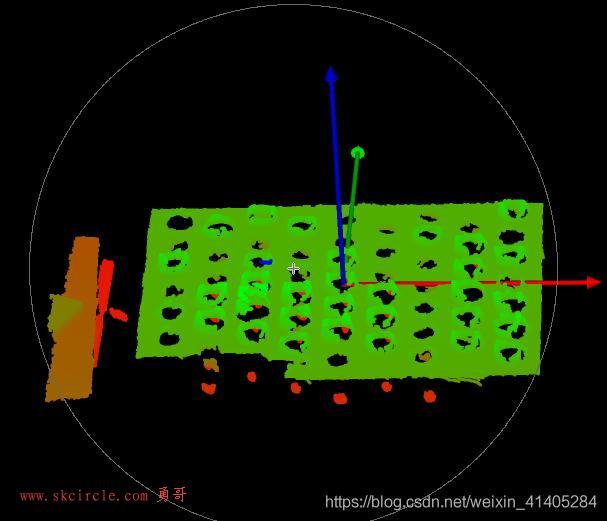
选取最多点数的点云区域
通过拟合光平面的方式求取该点云区域的位姿,拟合光平面采用最大释然法有较强的的鲁棒性,会忽略一些噪声。(此时点云被调平)
转载自:
https://blog.csdn.net/weixin_41405284/article/details/107775584