其实讲了这么久点云处理,点云操作无非就是对一系列数组进行操作。
这篇博文给大家讲解如何从获取的点云中提取ROI点云区域,并获取我们想要的点云模板。
1.从调平的点云数据中提取我们想要的ROI点云
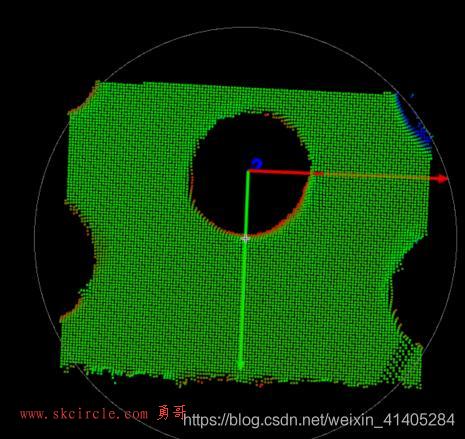
通过显示算子,调正点云区域
参数Pose是我们从哪个角度观察我们的点云数据,将Rx,Ry,Rz均设置成0,0,0.调正点云
Pose := [-0.1e-3,-0.47e-3,600,0,0,0,0]visualize_object_model_3d (WindowHandle, trans_Object1,CamParam, Pose, [], [], [], [], Instructions, Pose)12
2.提取ROI点云
绘制ROI,提取中心坐标
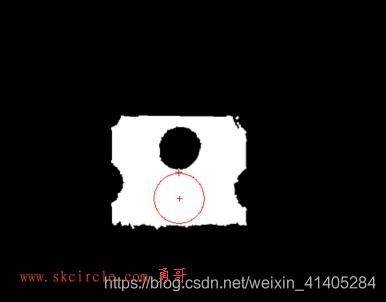
绘制不同大小的圆,提取圆环点云模板

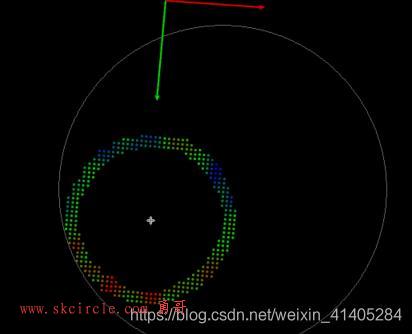
*注意这里相机内参的最后两个参数,要与窗口大小等同。*输入的Pose是待提取点云区域的Pose
CamParam := [0.01,0,7e-6,7e-6,384,255,768,512]
reduce_object_model_3d_by_view (CircleDiff, trans_Object1,CamParam, Pose, ObjectModel3DReduced)
转载自:
https://blog.csdn.net/weixin_41405284/article/details/107784935