伺服电子齿轮比(P1-44 & P1-45)的配置往往是运动控制案例首当其冲的课题
本文以两个Q&A演示电子齿轮比的推算过程,藉此理清公式换算之关系。
如有需要,读者可先回顾 PUU 位置单位 观念说明 以加深电子齿轮比之观念
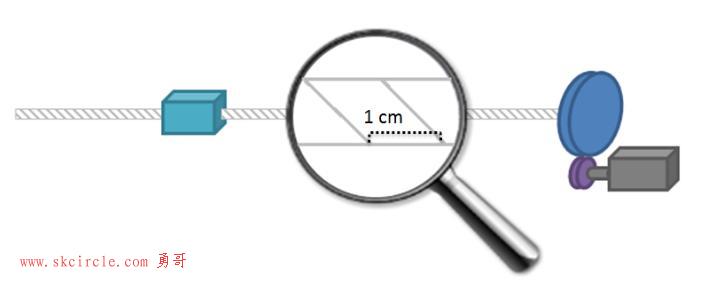
Q1. 如下图配置示意,螺杆的pitch为1 cm,且马达与螺杆的机械齿比关系为 10 : 1,求电子齿轮比P1-44 与 P1-45 设定值为何较洽当 ?
<解>
螺杆的pitch为 1 cm,故螺杆转动1圈相当于滑台移动 10000 μm,得出公式 a.
a. 1 rev = 10000 μm
tip我们已较细的单位「 μm」来计算 ,故 1 cm = 10000 PUU
又马达与螺杆的比例关系为 10 : 1 (马达转动10圈 = 螺杆转动1圈) , 故得出公式 b.
b. 1 rev = 10 * 1280000 * P1-45 / P1-44
因此由公式 a. 与 b. 的对等关系中得出齿轮比为:
10000 = 10 * 1280000 * P1-45 / P1-44 > P1-44 : P 1-45 = 1280 : 1
该电子齿轮比的配置下PUU已相等于μm,故欲让滑台移动 3000 μm则可控制伺服马达增量 3000 PUU
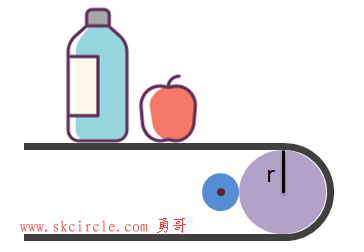
Q2. 如下图输送带示意,输送带圆盘半径r为 10 cm,该马达与输送带的机械齿比关系为 5 : 1 , 求电子齿轮比P1-44 与 P1-45 设定值为何较洽当 ?
<解>
圆盘转1圈相当于输送带移动该圆周 2πr,得出公式 a.
a. 1 rev = 2 * 100000 * π
tip我们已较细的单位「 μm」来计算,故半径 10 cm = 100000 PUU
又马达与输送带的机械齿比关系为 5 : 1 ,得出公式 b.
b. 1 rev = 5 * 1280000 * P1-45 / P1-44
因此由公式 a. 与 b. 的对等关系中得出齿轮比为:
2 * 100000 * π = 5 * 1280000 * P1-45 / P1-44 > P1-44 : P1-45 = 128 : 4π => 12800 : 1256
该电子齿轮比的配置下PUU已相等于μm,故欲让输送带移动 3000 μm则可控制伺服马达增量 3000 PUU