机器人原点位置
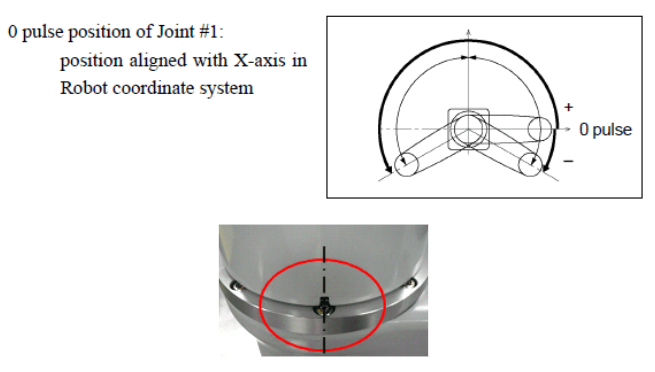
J1轴原点位置
J1轴的0脉冲方向和机器人的X轴的正方向重合
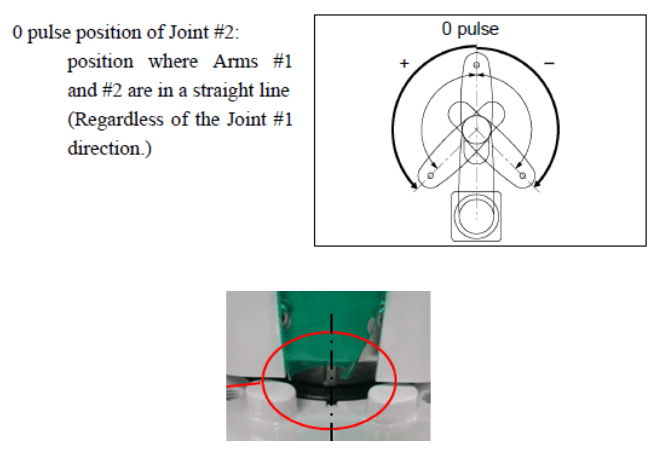
J2轴原点位置
J2轴的0脉冲方向和J1轴直线对齐
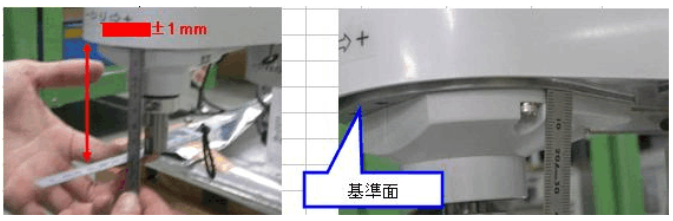
J3轴原点位置
J3轴的0脉冲位置接近最上运动范围

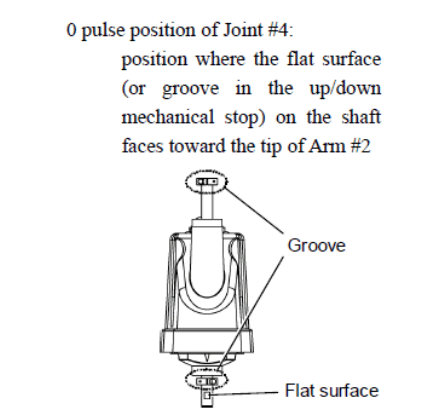
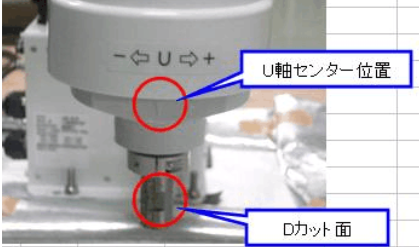
J4轴原点位置
J4轴0脉冲位置用丝杆上面的平面的平面或者限位坏上面的槽对准#2手臂前端的倒三角标志
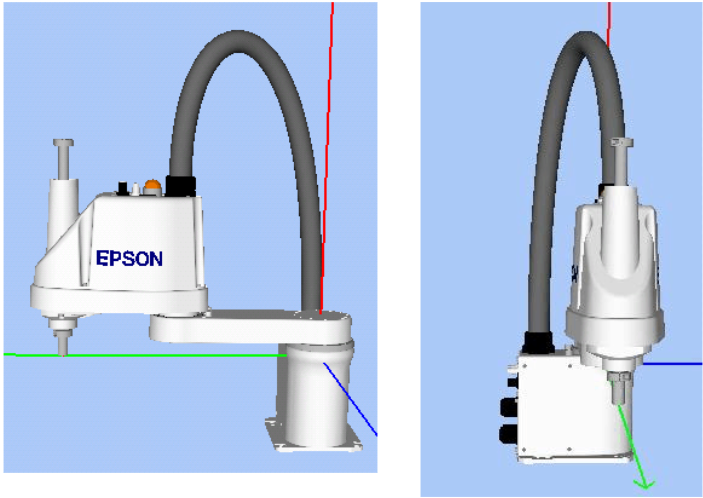
所有轴都在原点位置时机器人的姿势
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
机器人原点位置
J1轴原点位置
J1轴的0脉冲方向和机器人的X轴的正方向重合
J2轴原点位置
J2轴的0脉冲方向和J1轴直线对齐
J3轴原点位置
J3轴的0脉冲位置接近最上运动范围
J4轴原点位置
J4轴0脉冲位置用丝杆上面的平面的平面或者限位坏上面的槽对准#2手臂前端的倒三角标志
所有轴都在原点位置时机器人的姿势
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。
Powered By Z-BlogPHP 1.7.3
Copyright www.skcircle.com Rights Reserved.