本节虽然说是使用SVG格式,画矢量图标,但是其实我们只是使用了svg转为Geometry的数据画矢量图标。
本节虽然说是使用SVG格式,画矢量图标,但是其实我们只是使用了svg转为Geometry的数据画矢量图标。
接下来研究一下菜单和工具栏的使用。
FontAwesome.Sharp包是一个专门为
wpf功能增强库:Microsoft.Xaml.Behaviors.Wpf
待办事项小程序(3) Autofac改造
Autofac是一个第三方的di框架(依赖注入框架),这次用它来改造这个小程序。
在这次改造时,用到Autofac下面的知识点:
依赖注入的核心实现:通过 Autofac 以「构造函数注入」的方式,
待办事项小程序(1)
这是一个wpf的mvvm模式的练手小程序。
需求:见动图演示
如果勾选,则代表事情完成,文字会加上下划线。
见下面的xaml代码:
<Window x:Class="ADTVPro.MtvMainWindow"
xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation"
xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml"
xmlns:d="http://schemas.microsoft.com/expression/blend/2008"
xmlns:mc="http://schemas.openxmlformats.org/markup-compatibility/2006"
xmlns:local="clr-namespace:ADTVPro"
mc:Ignorable="d"
Title="MtvMainWindow" Height="450" Width="800">
<Grid>
<TabControl>
<TabItem Header="全部歌曲">
<Grid Background="#FFE5E5E5">
<ListBox x:Name="AllSongsListBox" d:ItemsSource="{d:SampleData ItemCount=5}">
<ListBox.ItemTemplate>
<DataTemplate>
<StackPanel Margin="2">
<TextBlock Text="{Binding SongName}" FontWeight="Bold" FontSize="14"/>
<TextBlock Text="{Binding Pinyin}" FontSize="12" Foreground="Gray"/>
</StackPanel>
</DataTemplate>
</ListBox.ItemTemplate>
</ListBox>
</Grid>
</TabItem>
<TabItem Header="选中的歌曲">
<Grid Background="#FFE5E5E5">
<ListBox d:ItemsSource="{d:SampleData ItemCount=5}"/>
</Grid>
</TabItem>
</TabControl>
</Grid>
</Window>
勇哥注:
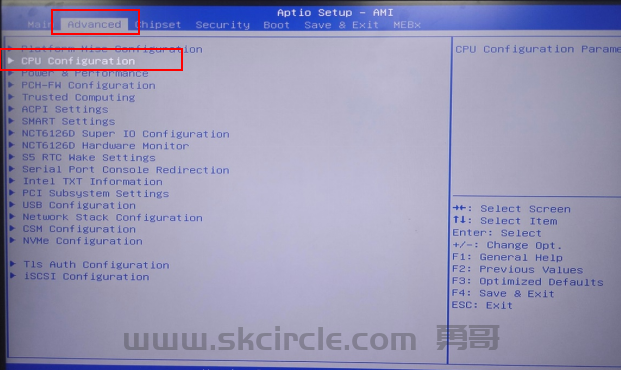
直接说结论,对于工控机中的Intel 12代酷睿i9-12900K,关闭其小核能带来5%左右的视觉检测方面的性能提升。
关闭CPU能效核(Efficient-cores,俗称“小核”)是要在bios中进行设置。
Powered By Z-BlogPHP 1.7.3
Copyright www.skcircle.com Rights Reserved.