少有人走的路
勇哥的工业自动化技术网站
三菱PLC练习题高级挑战篇,附答案2026-07-28 10:58:39
三菱PLC练习题中级挑战篇,附答案2026-07-28 10:52:12
Avalonia的UI排版练习2026-07-03 13:33:10
(一)StackPanel
软件设计的几大原则总结(一篇汇总勇哥全部相关文章)2026-04-17 14:04:19
面向对象软件设计原则,共七种
--------------------------------------
里氏替换原则
L:里氏替换原则(Liskov substitution principle) 继承必须确保父类所拥有的性质在子类中仍然成立。 子类可以扩展父类的功能,但不能改变父类原有的行为预期。
nx mcd中怎么把两个独立的配置体并成整体可以进行位置控制?2026-03-27 10:03:45
如下图所示的“
Avalonia学习(十二)菜单与工具条2026-03-26 11:47:29
菜单与工具条
MainWindowViewModel.cs
using CommunityToolkit.Mvvm.ComponentModel;
using CommunityToolkit.Mvvm.Input;
namespace _12_MenuToolbar.ViewModels;
public partial class MainWindowViewModel : ObservableObject
{
[ObservableProperty]
private string _statusMessage = "就绪";
[ObservableProperty]
private string _currentFile = "未保存";
[ObservableProperty]
private bool _isBold;
[ObservableProperty]
private bool _isItalic;
[ObservableProperty]
private bool _isUnderline;
[RelayCommand]
private void NewFile()
{
CurrentFile = "未命名.txt";
StatusMessage = "新建文件";
}
[RelayCommand]
private void OpenFile()
{
StatusMessage = "打开文件对话框";
}
[RelayCommand]
private void SaveFile()
{
StatusMessage = $"保存文件: {CurrentFile}";
}
[RelayCommand]
private void Exit()
{
StatusMessage = "退出应用程序";
}
[RelayCommand]
private void Undo()
{
StatusMessage = "撤销";
}
[RelayCommand]
private void Redo()
{
StatusMessage = "重做";
}
[RelayCommand]
private void Cut()
{
StatusMessage = "剪切";
}
[RelayCommand]
private void Copy()
{
StatusMessage = "复制";
}
[RelayCommand]
private void Paste()
{
StatusMessage = "粘贴";
}
[RelayCommand]
private void About()
{
StatusMessage = "关于 - 菜单和工具栏演示 v1.0";
}
}Avalonia学习(十一)SVG图形显示2026-03-26 10:37:33
SVG图形显示
SVG资源:
heart.svg
<svg xmlns="http://www.w3.org/2000/svg" width="24" height="24" viewBox="0 0 24 24" fill="none" stroke="currentColor" stroke-width="2" stroke-linecap="round" stroke-linejoin="round"> <path d="M20.84 4.61a5.5 5.5 0 0 0-7.78 0L12 5.67l-1.06-1.06a5.5 5.5 0 0 0-7.78 7.78l1.06 1.06L12 21.23l7.78-7.78 1.06-1.06a5.5 5.5 0 0 0 0-7.78z"></path> </svg>
Avalonia学习(十)多语言2026-03-26 10:31:56
多语言
LocalizationService.cs
using System.Collections.Generic;
using System.Globalization;
namespace _10_Localization.Services;
public class LocalizationService
{
private static LocalizationService? _instance;
public static LocalizationService Instance => _instance ??= new LocalizationService();
private string _currentLanguage = "zh-CN";
public string CurrentLanguage => _currentLanguage;
public event System.Action? LanguageChanged;
private readonly Dictionary<string, Dictionary<string, string>> _translations = new()
{
["zh-CN"] = new Dictionary<string, string>
{
["WelcomeText"] = "欢迎",
["WelcomeMessage"] = "欢迎使用多语言演示应用",
["UsernameLabel"] = "用户名",
["PasswordLabel"] = "密码",
["LoginButtonText"] = "登录",
["RegisterButtonText"] = "注册",
["LanguageLabel"] = "语言",
["SelectLanguageText"] = "选择语言",
["CurrentLanguageText"] = "当前语言:简体中文"
},
["en-US"] = new Dictionary<string, string>
{
["WelcomeText"] = "Welcome",
["WelcomeMessage"] = "Welcome to Localization Demo App",
["UsernameLabel"] = "Username",
["PasswordLabel"] = "Password",
["LoginButtonText"] = "Login",
["RegisterButtonText"] = "Register",
["LanguageLabel"] = "Language",
["SelectLanguageText"] = "Select Language",
["CurrentLanguageText"] = "Current Language: English"
},
["ja-JP"] = new Dictionary<string, string>
{
["WelcomeText"] = "ようこそ",
["WelcomeMessage"] = "多言語デモアプリへようこそ",
["UsernameLabel"] = "ユーザー名",
["PasswordLabel"] = "パスワード",
["LoginButtonText"] = "ログイン",
["RegisterButtonText"] = "登録",
["LanguageLabel"] = "言語",
["SelectLanguageText"] = "言語を選択",
["CurrentLanguageText"] = "現在の言語:日本語"
}
};
public string[] AvailableLanguages => new[] { "zh-CN", "en-US", "ja-JP" };
public string GetLanguageDisplayName(string code) => code switch
{
"zh-CN" => "简体中文",
"en-US" => "English",
"ja-JP" => "日本語",
_ => code
};
public void SetLanguage(string languageCode)
{
if (_translations.ContainsKey(languageCode) && _currentLanguage != languageCode)
{
_currentLanguage = languageCode;
LanguageChanged?.Invoke();
}
}
public string this[string key]
{
get
{
if (_translations.TryGetValue(_currentLanguage, out var dict) && dict.TryGetValue(key, out var value))
return value;
return key;
}
}
}Avalonia学习(九)页面导航2026-03-26 10:22:38
页面导航
HomeViewModel.cs
namespace _09_Navigation.ViewModels;
public partial class HomeViewModel : ViewModelBase
{
public override void OnNavigatedTo()
{
System.Console.WriteLine("Home page activated");
}
}Avalonia学习(八)样式2026-03-26 10:14:30
样式
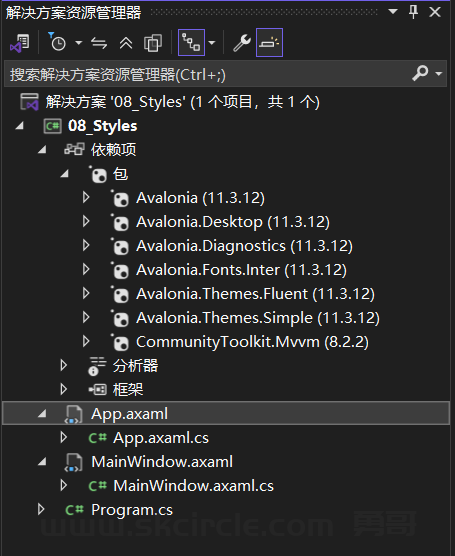
App.axaml
<Application xmlns="https://github.com/avaloniaui" xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml" x:Class="_08_Styles.App"> <Application.Styles> <FluentTheme /> </Application.Styles> <Application.Resources> <ResourceDictionary> <SolidColorBrush x:Key="PrimaryBrush" Color="#6200EE"/> <SolidColorBrush x:Key="SecondaryBrush" Color="#03DAC6"/> <SolidColorBrush x:Key="DangerBrush" Color="#CF6679"/> <SolidColorBrush x:Key="SuccessBrush" Color="#4CAF50"/> </ResourceDictionary> </Application.Resources> </Application>
- 控制面板
- 网站分类
-
- .net程序调试
- 系统架构师
- Remoting
- 消息队列
- WCF/SOA
- C#高级话题
- Xamarin和MAUI
- WinUI3
- asp.net
- 网站前端框架
- webApi
- .net core
- MEF
- asp.net core
- EFCore
- blazor
- gRPC
- 源生成器
- web端技术
- 驱动开发
- java
- 工业仿真
- 物联网/工业互联网
- 虚拟现实和增强现实
- solidworks
- 行业示例源码和资源
- 大模型相关
- 知识变现
- 本站开源软件与资源
- 自定义控件
- 本站原创软件与资源
- OSGI.NET
- Workflow
- 杂七杂八的文章
- 网页自动化技术
- c++/QT/MFC
- 机器人/手眼标定
- 理财知识
- 视觉实验
- netMarketing类库说明档
- 电气与3D图
- OpenCV
- 数据库
- Matlab
- C#/.net框架
- C# 异步编程
- C# TPL
- C#事件与委托
- python
- 工业视觉/halcon
- 面向对象/设计原则/设计模式/代码重构
- 跨平台开发
- 版本控制
- 哲学与人生
- PLC和单片机技术
- VisionPro
- 行业软硬件
- 行业算法与知识
- 行业新闻与工作经验
- WPF/Avalonia
- 生活记事本
- 分类器、神经网络、深度学习
- 工业相机镜头选型
- halcon标定
- 凌云视觉软件
- SciSmtCam
- VisionMaster
- 3d视觉/点云
- 运动控制
- 搜索
- 最新留言
-
- 赞
- 学习
- 操作系统不能在这种内存虚拟盘中安装的,所以没戏
- 刚刚搜了一下,windows系统下也可以用ImDisk这个工具在内存中创建一个RAM磁盘,然后在里面安装软件
- 我觉得可以的,用Linux系统可以很方便地在内存中创建一个tmpfs文件系统,然后在里面安装软件
- 光度立体法对于线扫相机采图,好像不是很适用,采图太麻烦了
- 点太小了,我用笔画一个圆,然后视觉找圆中心,精度还可以
- 老哥, 优化一下界面排版吧, 图片挡住文字了
- 可以建工具坐标系,把旋转中心往C点接近这样距离是不是就变小了呢?这样是否可行呢?
- 勇哥 ,可以找你买 netMarketing高版本 使用 halcon19.11或者可以用halcon23.11的源码吗。
- 文章归档
-
- 2026年7月 (3)
- 2026年4月 (1)
- 2026年3月 (14)
- 2026年1月 (31)
- 2025年12月 (2)
- 2025年11月 (11)
- 2025年10月 (10)
- 2025年9月 (5)
- 2025年8月 (13)
- 2025年7月 (14)
- 2025年6月 (21)
- 2025年5月 (13)
- 2025年4月 (1)
- 2025年3月 (7)
- 2025年2月 (9)
- 2025年1月 (10)
- 2024年12月 (21)
- 2024年11月 (40)
- 2024年10月 (23)
- 2024年9月 (5)
- 2024年8月 (26)
- 2024年7月 (52)
- 2024年6月 (64)
- 2024年5月 (55)
- 2024年4月 (13)
- 2024年3月 (19)
- 2024年2月 (7)
- 2024年1月 (6)
- 2023年12月 (20)
- 2023年11月 (31)
- 2023年10月 (3)
- 2023年9月 (1)
- 2023年8月 (7)
- 2023年7月 (3)
- 2023年6月 (2)
- 2023年5月 (3)
- 2023年4月 (1)
- 2023年3月 (10)
- 2023年2月 (35)
- 2023年1月 (8)
- 2022年12月 (66)
- 2022年11月 (52)
- 2022年10月 (11)
- 2022年8月 (7)
- 2022年7月 (9)
- 2022年6月 (18)
- 2022年5月 (4)
- 2022年4月 (6)
- 2022年3月 (2)
- 2021年10月 (4)
- 2021年9月 (26)
- 2021年8月 (2)
- 2021年7月 (60)
- 2021年6月 (15)
- 2021年5月 (11)
- 2021年4月 (3)
- 2021年3月 (12)
- 2021年2月 (23)
- 2021年1月 (37)
- 2020年12月 (69)
- 2020年11月 (88)
- 2020年10月 (50)
- 2020年9月 (9)
- 2020年8月 (16)
- 2020年7月 (42)
- 2020年6月 (63)
- 2020年5月 (59)
- 2020年4月 (87)
- 2020年3月 (79)
- 2020年2月 (143)
- 2020年1月 (41)
- 2019年12月 (82)
- 2019年11月 (122)
- 2019年10月 (34)
- 2019年9月 (13)
- 2019年8月 (16)
- 2019年7月 (46)
- 2019年6月 (2)
- 2019年5月 (17)
- 2019年4月 (45)
- 2019年3月 (59)
- 2019年2月 (12)
- 2019年1月 (25)
- 2018年12月 (41)
- 2018年11月 (78)
- 2018年10月 (80)
- 2018年9月 (28)
- 2018年8月 (13)
- 2018年7月 (75)
- 2018年6月 (37)
- 2018年5月 (1)
- 2018年4月 (1)
Powered By Z-BlogPHP 1.7.3
Copyright www.skcircle.com Rights Reserved.
站长QQ:496103864 微信:abc496103864