机器人视觉标定
如果旋转中心不动 只旋转就为0呀...
旋转中心标定方式的说明在下面的图例中,红色为相机视野(FOV),黄色为工件,五星为Mark点。(训练的标准位置)(工件发生平移)(工件发生旋转与平移)(图4)旋转中心方法用于所有机器人与视觉配合场景方法 :计算工件实际发生的偏移量 和旋转,结合机器人的旋转中心进行二次补偿后 ,把...
还有 5 人发表了评论 加入13556人围观旋转中心标定方式的说明在下面的图例中,红色为相机视野(FOV),黄色为工件,五星为Mark点。(训练的标准位置)(工件发生平移)(工件发生旋转与平移)(图4)旋转中心方法用于所有机器人与视觉配合场景方法 :计算工件实际发生的偏移量 和旋转,结合机器人的旋转中心进行二次补偿后 ,把...
还有 5 人发表了评论 加入13556人围观
 勇哥,很想停止 发表于2019-01-09 浏览33037 评论2 勇哥,很想停止 发表于2020-04-10 浏览32946 评论3
勇哥,很想停止 发表于2019-01-09 浏览33037 评论2 勇哥,很想停止 发表于2020-04-10 浏览32946 评论3 勇哥,很想停止 发表于2021-02-01 浏览22194 评论1 勇哥,很想停止 发表于2022-05-09 浏览9901 评论0 勇哥,很想停止 发表于2024-06-21 浏览1049 评论0
勇哥,很想停止 发表于2021-02-01 浏览22194 评论1 勇哥,很想停止 发表于2022-05-09 浏览9901 评论0 勇哥,很想停止 发表于2024-06-21 浏览1049 评论0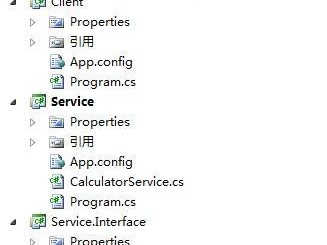 勇哥,很想停止 发表于2024-06-21 浏览1213 评论0
勇哥,很想停止 发表于2024-06-21 浏览1213 评论01:WCF异常在配置文件
<configuration> <system.serviceModel> <behaviors> <serviceBehaviors> <behavior name="serviceDebuBehavior"> <serviceDebug includeExceptionDetailInFaults="true" /> </behavior> </serviceBehaviors> </behaviors> <services> <service name="Artech.WcfServices.Service.CalculatorService" behaviorConfiguration="serviceDebuBehavior"> <endpoint address="http://127.0.0.1:3721/calculatorservice" binding="ws2007HttpBinding" contract="Artech.WcfServices.Service.Interface.ICalculator" /> </service> </services> </system.serviceModel> </configuration>
勇哥,很想停止 发表于2024-06-21 浏览1058 评论0本篇博文只是简单说下WCF中的契约的种类、作用以及一些简单的代码示例。在WCF中契约分为服务契约、数据契约和消息契约。下面对这几种契约进行简单的介绍。
 勇哥,很想停止 发表于2024-06-21 浏览1011 评论0
勇哥,很想停止 发表于2024-06-21 浏览1011 评论0学以致用”,如果仅仅是希望能够在项目中合理地应用WCF,那么对于程序员而言,可以有两种选择,一种是“知其然而不知其所以然”,只要掌握了WCF的基础知识,那么对于一般的应用就足够了。
勇哥,很想停止 发表于2024-06-21 浏览1118 评论0Windows Communication Foundation (WCF)是Microsoft为构建面向服务的应用提供的分布式通信编程框架,是.NET Framework 3.5的重要组成部分。使用该框架,开发人员可以构建跨平台、安全、可靠和支持事务处理的企业级互联应用解决方案。
 勇哥,很想停止 发表于2024-06-21 浏览1076 评论0
勇哥,很想停止 发表于2024-06-21 浏览1076 评论0我们首先先新建一个WCF服务项目(代码没有改变,都是默认生成),然后把它部署到IIS上面,为我们下面客户端调用做准备(当然IIS宿主只是其中一种,还有Windows服务、Winform程序、控制台程序中进行寄宿);
 勇哥,很想停止 发表于2024-06-21 浏览999 评论0
勇哥,很想停止 发表于2024-06-21 浏览999 评论0实例上下文(InstanceContextMode):可以简单地理解为服务端的服务实例与客户端的服务代理之间的关联方式;
 勇哥,很想停止 发表于2024-06-21 浏览1170 评论0
勇哥,很想停止 发表于2024-06-21 浏览1170 评论0勇哥注:
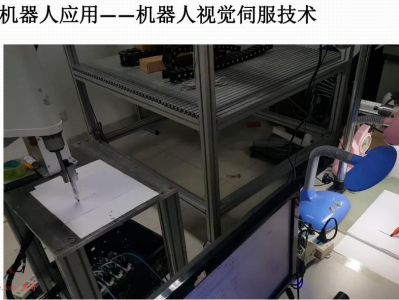
挺有意思的一个应用。
动态跟随人划的笔迹。