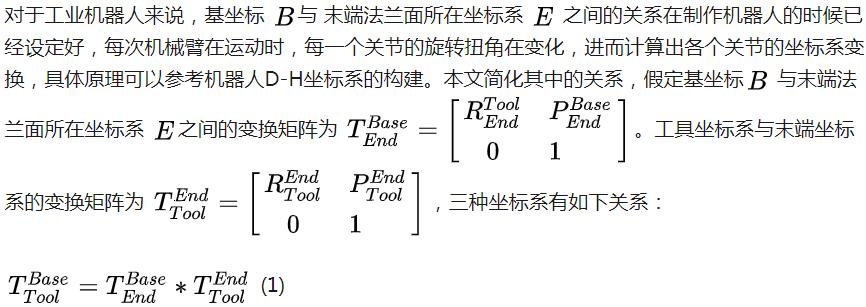
工业机器人使用过程中经常在机器人末端法兰面安装不同的工具来满足实际生产需求,为了准确控制工具运动的位置与姿态,需要对工具所在坐标系进行标定。
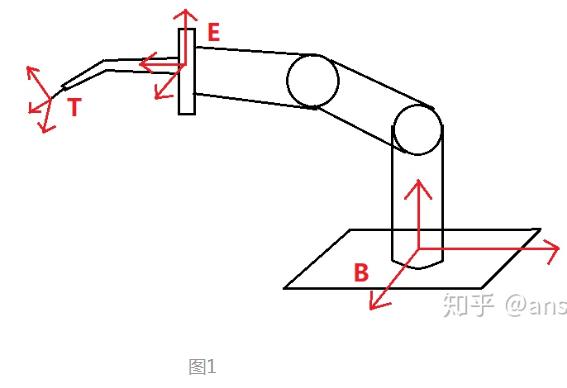
三种坐标系关系如下图1所示:
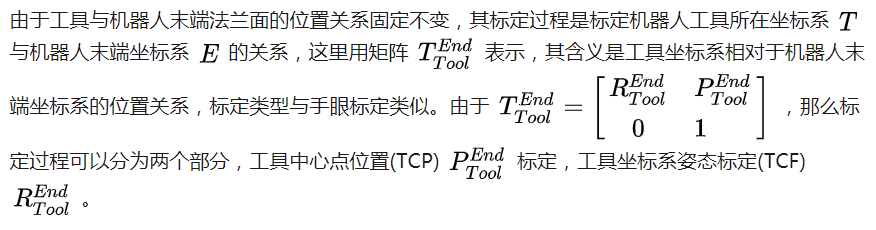
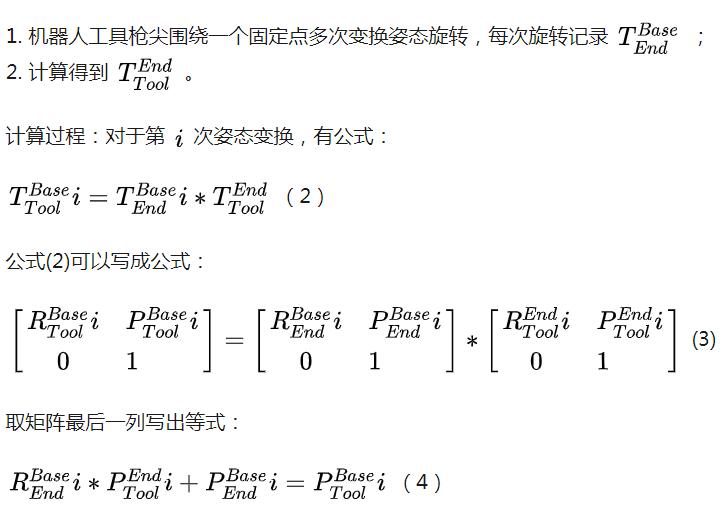
工具中心点位置(TCP)标定
步骤:
工具坐标系姿态(TCF)标定
我认为工具坐标系姿态比较好标定,看上面图1,工具坐标系  的零点在枪尖末端,一旦位置确定后,姿态可以是任意的,有无数种,就看选择那种比较方便了。目前接触到两种标定姿态:
的零点在枪尖末端,一旦位置确定后,姿态可以是任意的,有无数种,就看选择那种比较方便了。目前接触到两种标定姿态:
工具坐标系姿态直接使用机器人末端
 的姿态,这样两者之间只有平移关系;
的姿态,这样两者之间只有平移关系;工具坐标系姿态直接使用机器人基座
 的姿态,同样两者之间只有平移关系。
的姿态,同样两者之间只有平移关系。
公式不写出来了,好像很简单。
其实工具坐标系姿态也可以直接使用机器人其他关节的姿态。
安川机器人的五点标定中的姿态标定应该是上面2的方法,因为标定时候只是在旋转枪尖,没有平移的操作。安川机器人的25点标定是在消除标定时带来的随机误差,使得标定更加准确。
本文参考文献:熊烁, 叶伯生, 蒋明. 机器人工具坐标系标定算法研究%Study of Robot Tool Coordinate Frame Calibration[J]. 机械与电子, 2012, 000(006):60-63.