如图1。
我们假设矩形就是电池。则这个电池是作为模板电池,其摆放的位置、机器人吸嘴过来取的位置都是做为模板位置。
B1是模板特征点。本例子我们以电池左边与顶边的相交点做为特征点,且以顶线做为特征点的U。
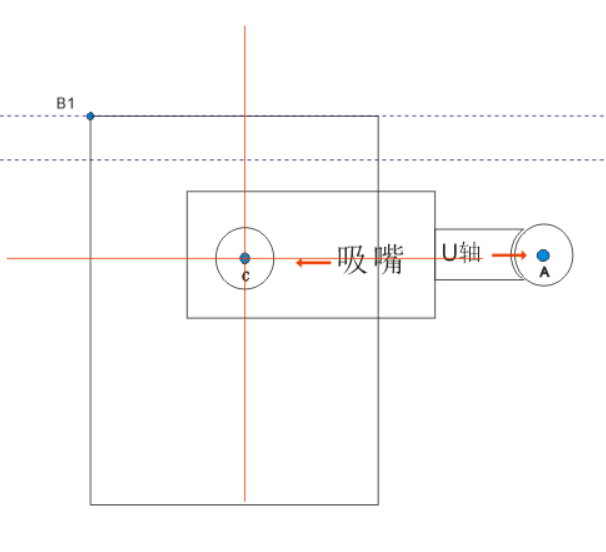
(图1)
图2中,电池故意旋转一定角度放置。此时的B2点为当前电池的特征点。
此时当前电池的特征点B2的U坐标减去模板特征点B1的U坐标,取得了相差的角度,后面我们利用这个角度进行旋转模板特征点。
相差角度=B1.U-B2.U
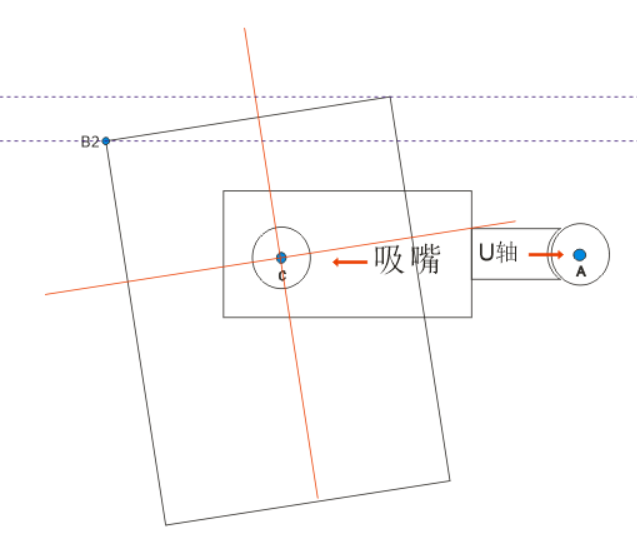
(图2)
下图中,我们旋转模板特征点B1,旋转的角度为B1.U-B2.U,旋转中心为机器人的法兰盘中心A(U轴中心)。
旋转后的模板特征点B1,其XY坐标已经被更新,此时我们可以计算出现在的特征点B2相对于旋转后的B1"的X,Y坐标的差值。
即:
偏差X=当前电池特征点B2.X-旋转后的模板特征点B1".X
偏差Y=当前电池特征点B2.Y-旋转后的模板特征点B1".Y
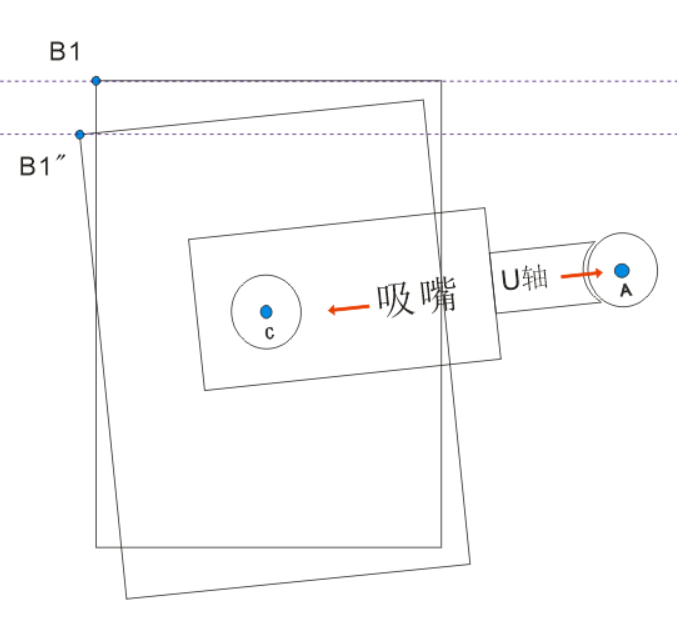
(图3)
接下来我们求出机器人的X,Y需要走多少才可以到达相对于原模板的位置。(即下图十字红线的交点位置)
机器人X= 法兰盘中心位置(A点).X+偏差X
机器人Y=法兰盘中心位置(A点).Y+偏差Y
机器人U=法兰盘中心位置(A点).U+相差角度
此时机器人修正后的位置的XYU即可以让吸嘴相对于电池的位置与原模板保持一致。
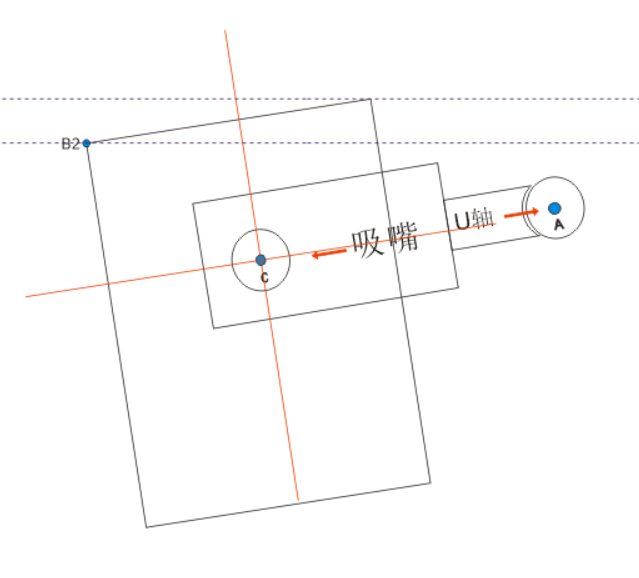
(图4)
勇哥总结一下过程:
先放置一片电池做为模板,摆正位置,同时摆正吸嘴的位置。取得此时模板的特征点XYU,记录下吸嘴此时的XYU(即取料位置的XYU)。
旋转模板特征点,旋转中心为机器人法兰盘中心,旋转角度为当前电池特征点的U减去模板特征点的U。
因为是以法兰盘为中心旋转的,所以此的旋转后模板的特征点XY坐标肯定跟当前电池的特征点的XY坐标是不同的,我们要求出其差值。
机械手再平移这些差值,如果机械手移动到上述点,则本次定位特征与模板特征重合。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!