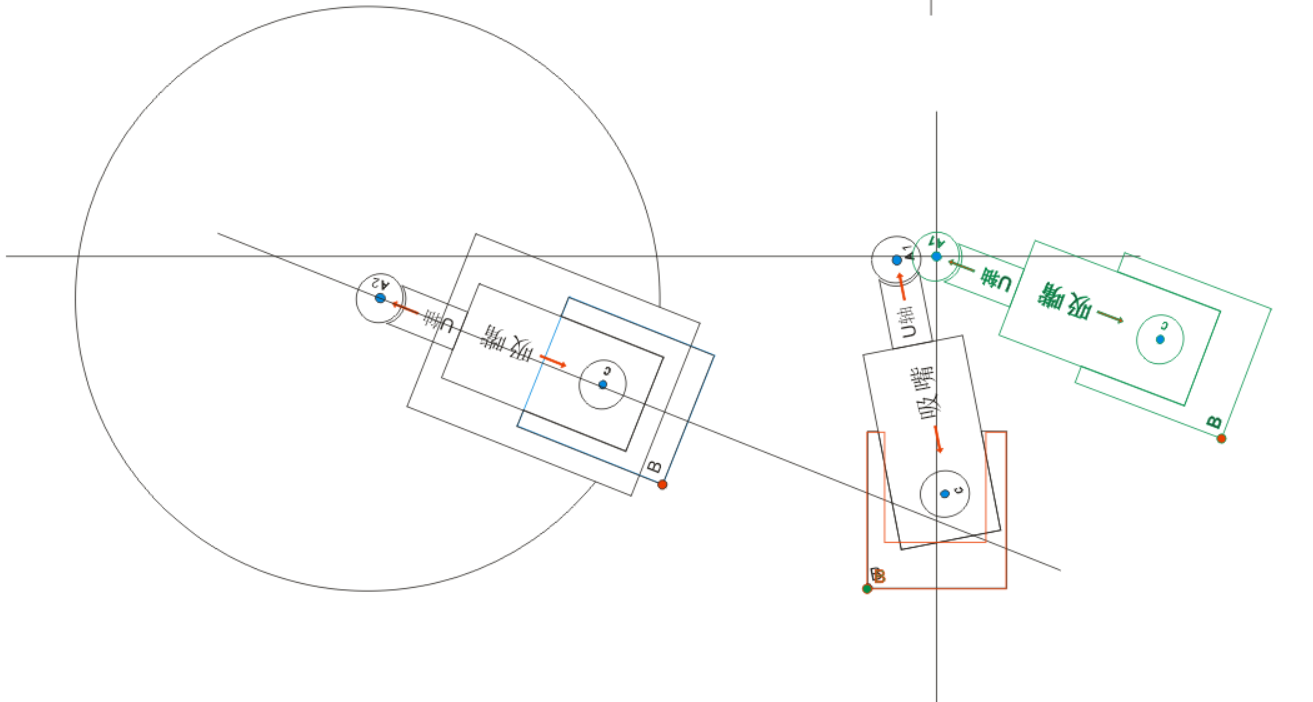
下图中分别为在转盘上的,模板放料位置。
位于下相机拍照位置的模板拍照位置。(垂直90的吸嘴C下面就是CCD拍照的位置)
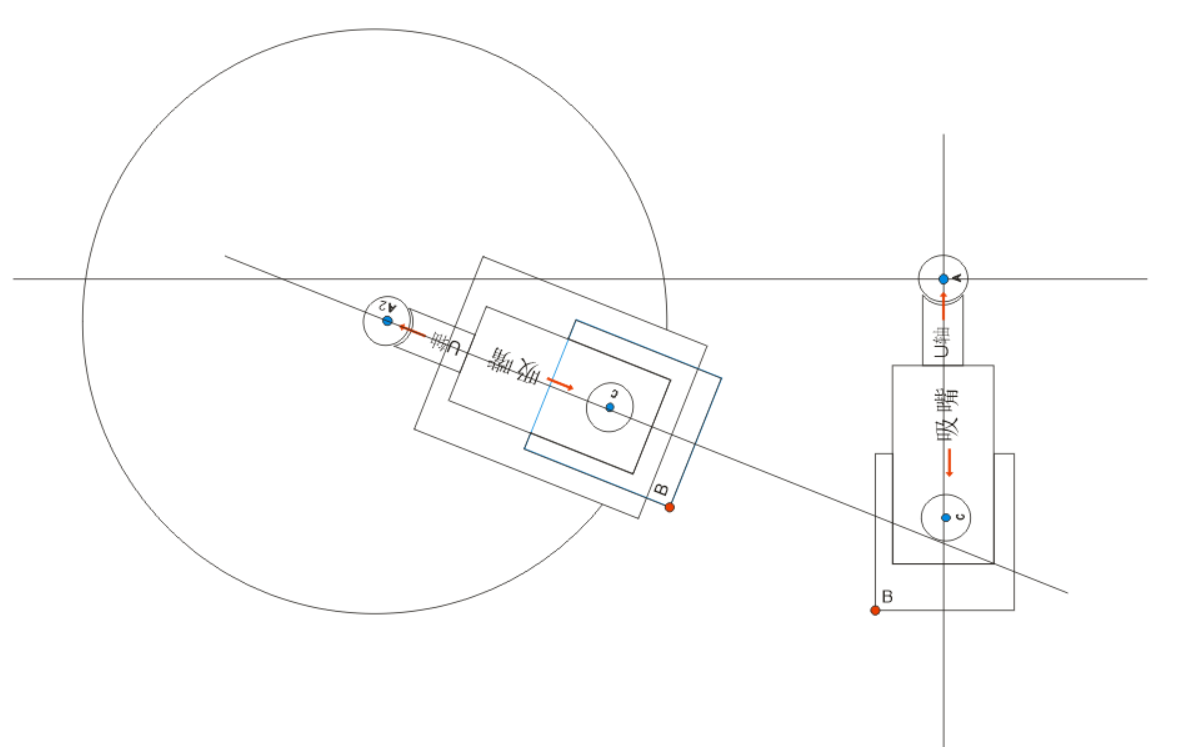
下图中,我们计算模板放置位置A2到模板拍照位置A1的偏移。
偏移X=A2.X-A1.X
偏移Y=A2.Y-A1.Y
偏移U=A2.U-A1.U
然后旋转偏移U,旋转后的模板特征点B要记下来,后面会用到。
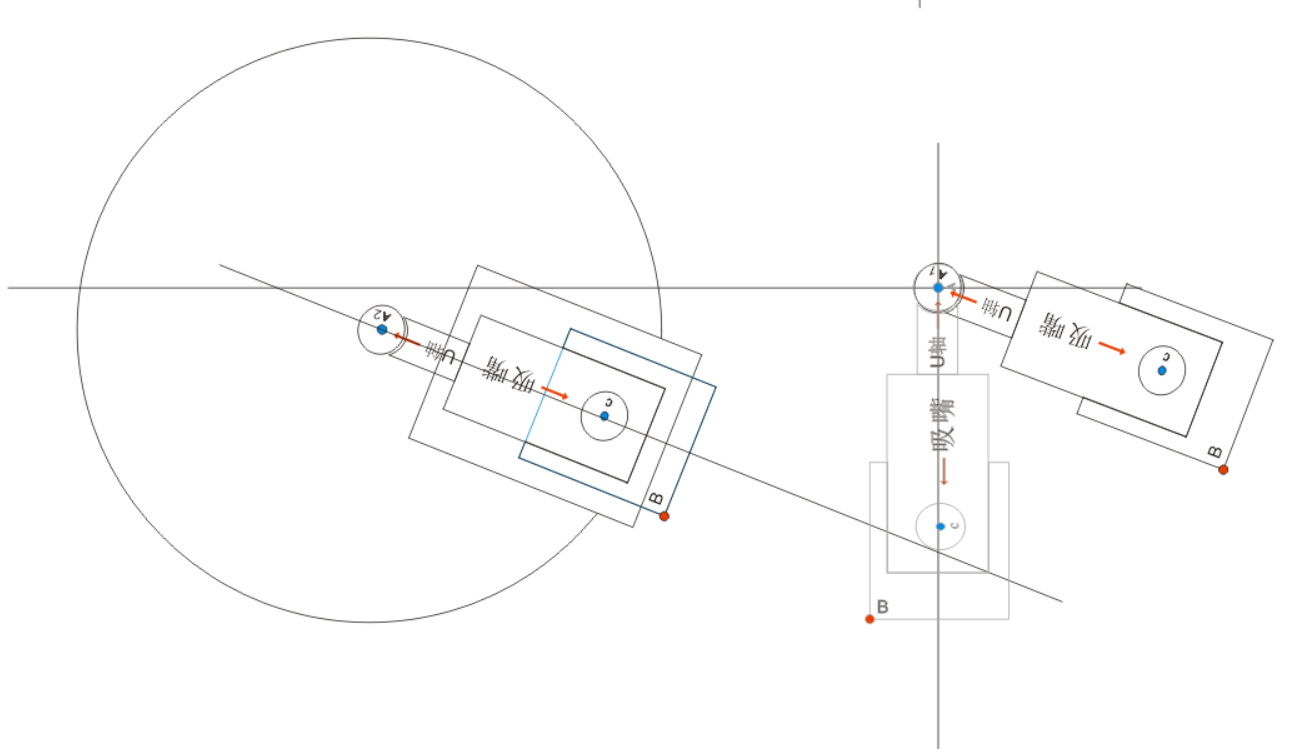
当拍照位置吸嘴下面的电池是歪的,它与原来的拍照模板之间存在位置差别,我们的目的是样让它们位置重合。
旋转中心为拍照位置的机械坐标(A1),旋转角度为当前特征点与模板特征点的角度差,我们先把当前电池特征点的角度扭正。
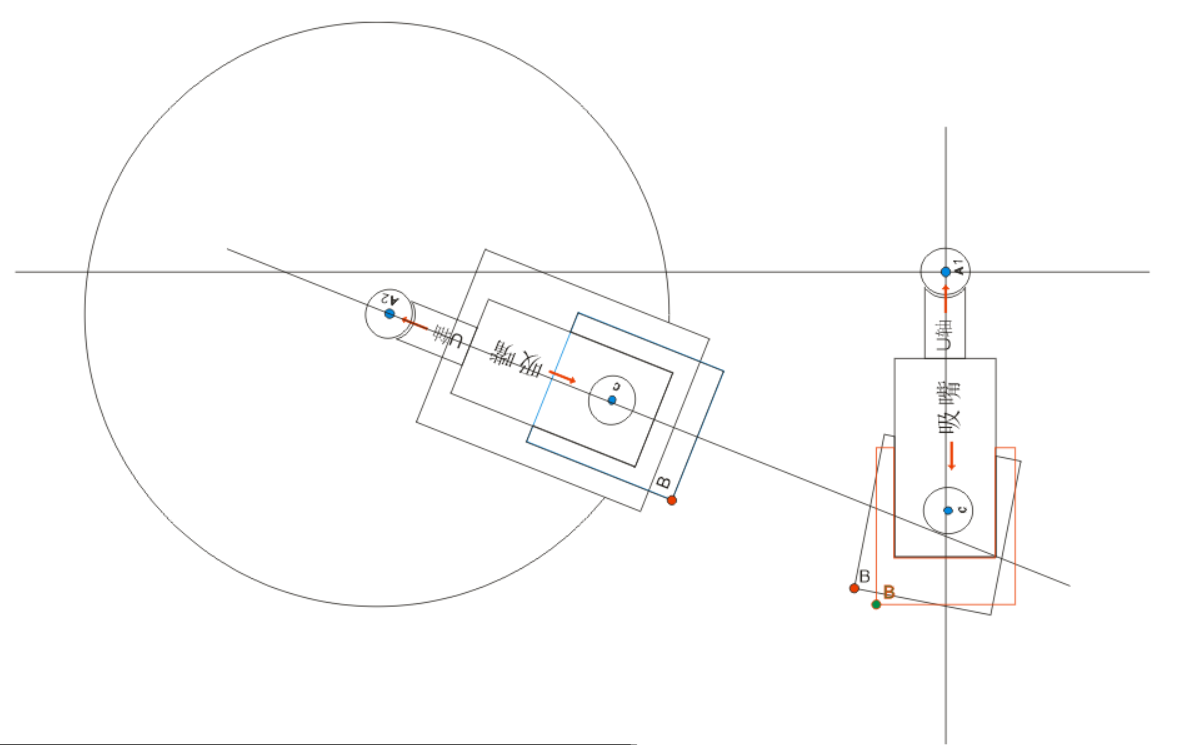
接下来补正两者x,y的偏差,这样他们就重合在一起了。
这时候你会发现位置补正后的拍照位置(黑色a1)和模板拍照位置(绿色a1)是不一样的。
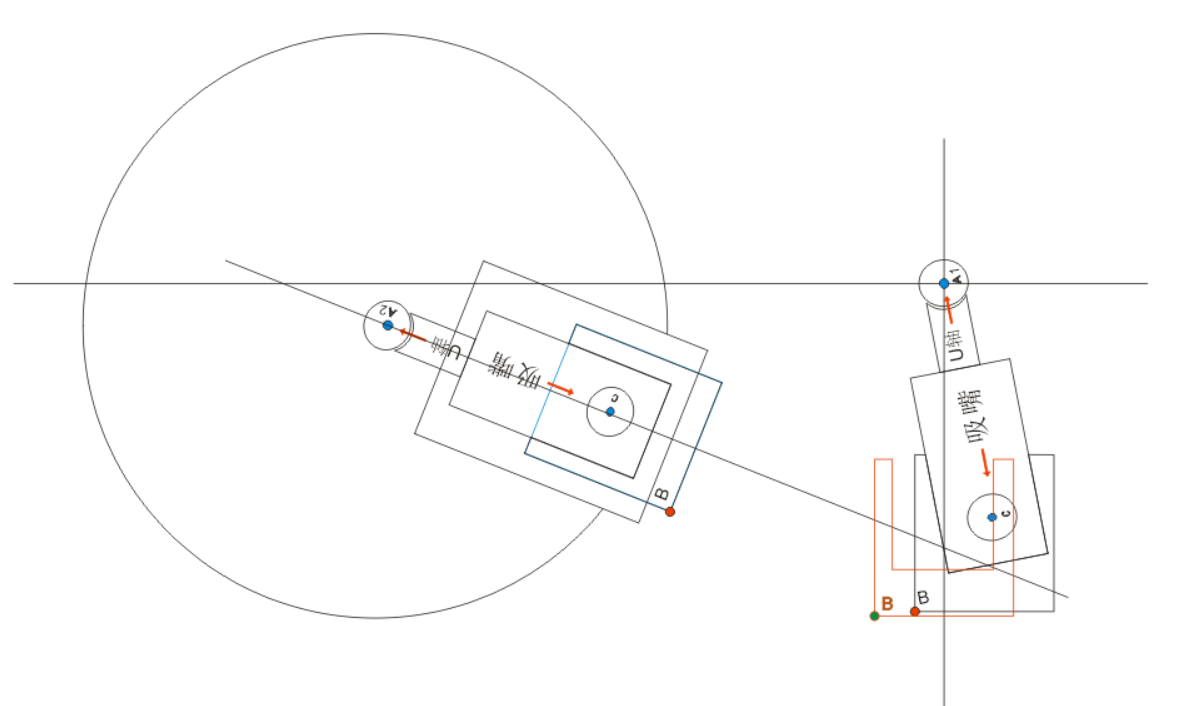
用经过位置补正后的当前电池的拍照位置(黑色a1)为旋转中心,旋转角度为偏移U,旋转当前电池的特征点B。结果U已经和旋转后的模板特征点B.U一样了。
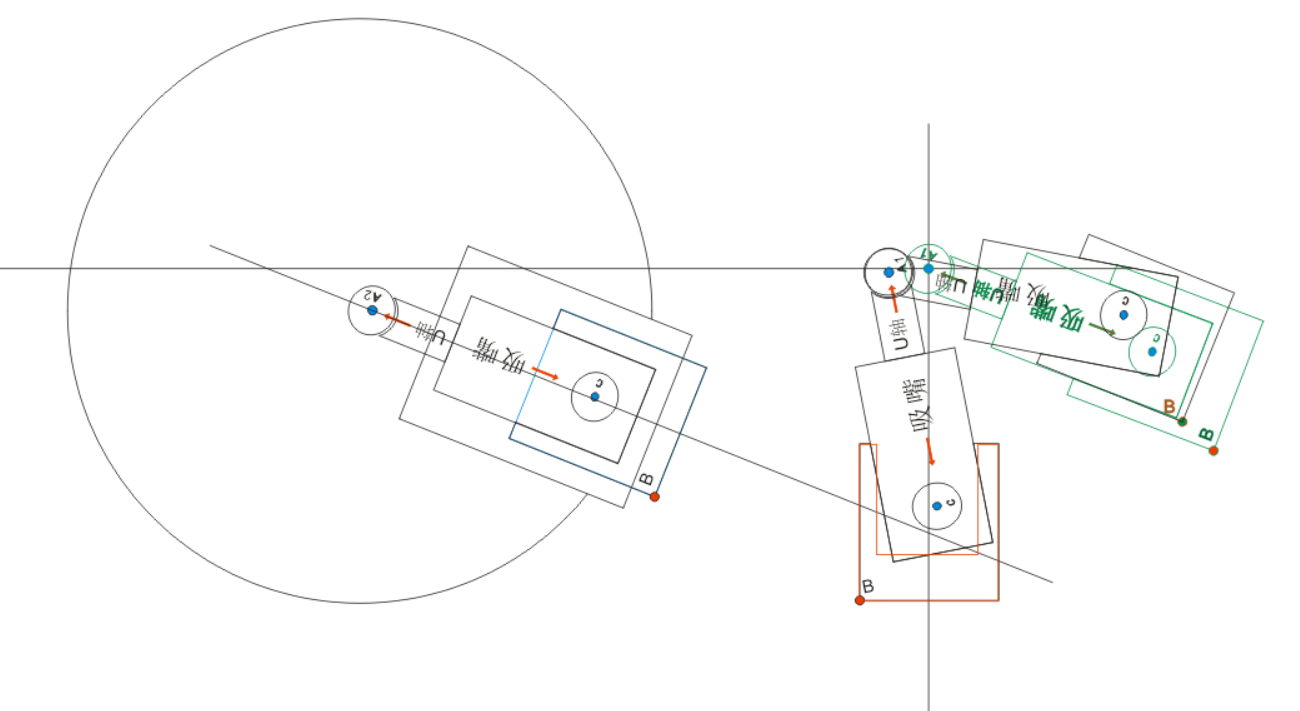
最后我们依次补正位置:
黑色a1的位置,加上红色B-绿色B的位置
再加上偏移X,偏移Y
可以看到放歪的电池精确的和模板放料位置重合!
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!