机器人视觉 机器人视觉标定
tool1结果x,y,z,u是这么算出来的,是在机器人程序里边计算的吗...
首先,我们要了解一下常规的手眼标定流程是怎么样的。(一)如果吸嘴中心就是法兰盘的中心则是下面这样的:按九宫格走九个点,取得九组吸嘴的像素坐标与法兰盘的机械坐标 ...
还有 8 人发表了评论 加入28102人围观首先,我们要了解一下常规的手眼标定流程是怎么样的。(一)如果吸嘴中心就是法兰盘的中心则是下面这样的:按九宫格走九个点,取得九组吸嘴的像素坐标与法兰盘的机械坐标 ...
还有 8 人发表了评论 加入28102人围观
 勇哥,很想停止 发表于2019-01-09 浏览33032 评论2 勇哥,很想停止 发表于2020-04-10 浏览32942 评论3
勇哥,很想停止 发表于2019-01-09 浏览33032 评论2 勇哥,很想停止 发表于2020-04-10 浏览32942 评论3 勇哥,很想停止 发表于2021-02-01 浏览22193 评论1 勇哥,很想停止 发表于2022-05-09 浏览9900 评论0
勇哥,很想停止 发表于2021-02-01 浏览22193 评论1 勇哥,很想停止 发表于2022-05-09 浏览9900 评论0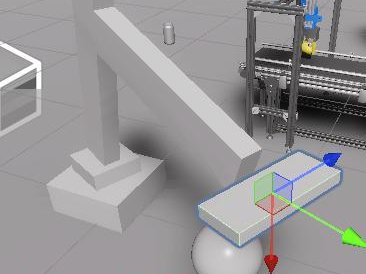 勇哥,很想停止 发表于2024-11-01 浏览934 评论0
勇哥,很想停止 发表于2024-11-01 浏览934 评论0勇哥注:
工业机器人使用两个约束就可以实现动作,一个是Aim Constraint,一个是Rotation Constraint。
两种约束,都是“注视”一个目标,目标移动,则机器人凡是添加了约束的关节都会联动。