 少有人走的路
少有人走的路很多机器视觉项目工程师在做视觉项目评估时都会涉及到硬件匹配选型的精度计算。大部分工程师都很清楚工业相机的分辨率和精度的关系,但是涉及到如何匹配远心镜头才能使得相机分辨率不浪费,这里面就需要了解一下关于镜头匹配精度的细节问题,下面我就介绍一下这方面的知识。
首先介绍几个涉及到镜头精度的概念:
数值孔径NA和F#
它们都是描述单位点被光学系统采集到的光能量的量化指标。
NA一般针对放大倍率大于1倍及其以上的光学系统,常用于显微镜。
F#一般用于放大倍率小于1倍的光学系统,定焦、远心、变焦等。
NA越大,镜头成像越亮,NA和F#的关系如下:
F#=1/2NA
相机的精度—分辨率(像元)
镜头的精度—分辨率(艾利斑)
物方的每个点经过光学系统到像方都会形成一个同心圆环组成的艾利斑
物方两个点无限靠近时,像方的艾利斑会叠加,当像方艾利斑中心间隔小到
0.61λ/NA{1.22 λ(F#)}时达到分辨极限 (设计时的理论极限)
红外IR ——紫外UV(衍射极限随着波长的减小在变大)
极限频率=2NA/λ
λ为中心波长
从以上可以看出,镜头的分辨率和工作波段、光圈大小有着紧密的关系。
那么,如何通过计算镜头和相机匹配的精度呢?
首先要介绍关于MTF和CTF的概念:
MTF 光学传递函数》CTF光学调制函数
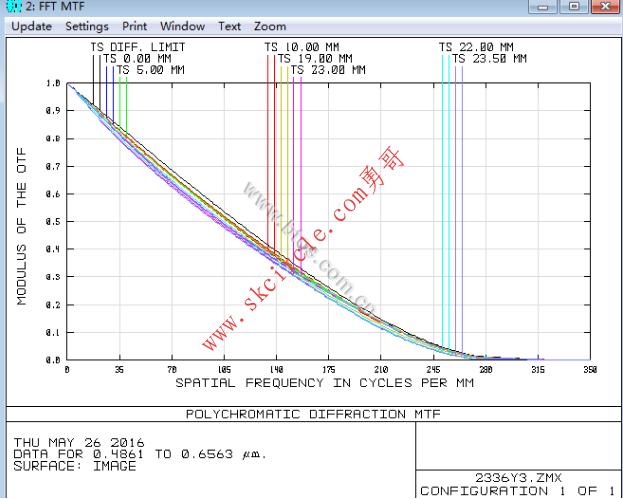
MTF和CTF是镜头分辨率的另一种直观体现形式。
一个黑白相间的条纹称为一个线对
一个光学系统能够清晰分辨最细的一组图案(线对条纹)被认为是系统的分辨极限,表示为每毫米的线条数
镜头和相机是如何匹配的呢?
镜头和相机的靶面匹配:
镜头的成像圆直径=相机芯片对角线尺寸
镜头的成像圆直径<相机芯片对角线尺寸(黑角)
镜头的成像圆直径>相机芯片对角线尺寸(镜头倍率浪费)
镜头设计中心弥散圆直径相机像元尺寸
以相机像元尺寸做为整个成像系统的像方分辨精度,通过倍率换算得到物方分辨精度。
光学倍率=h/H或v/V
光学倍率=像方分辨率/物方分辨率
相机的极限分辨率(线对)=1/2*像元尺寸
比如EM510相机2456*2058 像元尺寸3.45μm
相机的极限分辨率(线对)=1/2*0.00345=144.93lp/mm
相机的靶面 h=2456*0.00345=8.4mm;v=2058*0.00345=7.1mm
例子:EM510匹配BT2336
BT2336的倍率为0.243X
整体精度为:
相机的极限分辨率(线对)*镜头倍率
144.93*0.243=35.217lp/mm
1/线对*2=精度(mm)
1/35.217*2=0.014mm
EM510匹配BT2336的精度即0.014mm
以上只是给大家简单介绍了一下关于镜头精度的一些概念,镜头和相机的匹配需要考虑的问题还很多,我们会在以后的技术文章里来做说明。如果有对这里面的技术内容有兴趣深入探讨的可以联系远心光学系统公司。




")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





