勇哥注:
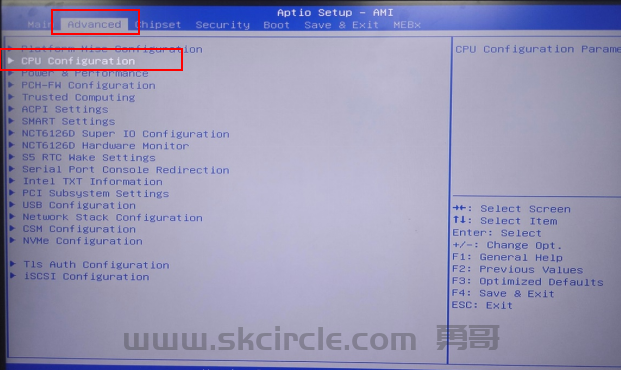
直接说结论,对于工控机中的Intel 12代酷睿i9-12900K,关闭其小核能带来5%左右的视觉检测方面的性能提升。
关闭CPU能效核(Efficient-cores,俗称“小核”)是要在bios中进行设置。
勇哥注:凸轮功能其实勇哥也不熟悉,最后在汇川h3u的plc看到这种指令,因此想了解一下它。在此贴记录一下了解的过程,不会的朋友也好一起扫盲。追锯、追标、飞剪电子齿轮的经典应用。图1是追锯的演示。编码器旋转一周,滑动电锯会同步完成锯木动作,并返回初始位置。 (编码器) (滑动电锯)(图1)图2是追标的应用。黄色的传送带轴、青色的贴标纸轴、切刀轴是靠凸轮功能同步旋转的
深度学习的发展历史2022-07-27 10:41:34
本篇给大家介绍神经网络的发展史。了解神经网络的发展史可以帮助我们更好的学习深度学习,
更清楚的把握深度学习的发展方向。
了解深度学习的历史,首先要了解深度学习的几个重要事件。
首先是1943年神经网络被提出,提出神经网络的是心理学家麦卡洛克和数学逻辑学家皮兹,
他们在论文神经活动中内在思想的逻辑演算中提出了神经网络模型,描述了一个基于神经网络的数学模型,
从此为神经网络打开了一个新时代。
1957年,心理学家罗森布莱特提出了感知器网络,并提出采用赫步学习规则或最小二乘法来训练感知器的
摘 要当前我国信息科技的发展, 产业界自动化生产水平越来越高。 具体在电子产品行业, 随着精细化和自动化的发展, 电子产品的焊点质量的好坏, 深刻地影响着产品成品的质量和效率, 因此, 对于焊点的缺陷检测也成为了 电子制造行业亟需解决的问题。 传统的人工检测方法存在费时、 精度低、 效率低下等问题, 各种新的检测方法应运而生。 其中, 机器视觉运用到自动化生产乃至焊点检测已经成为当代自动化生产发展的趋势。 世界制造业的发展, 对于电子产品的焊点自动化检测的智能化技术水平也提出了 更高的要求, 实
勇哥碰到下面这个错误。我记得之前是好好的。MyEngine.UnloadAllProcedures(); 这个在halcon19.11是没有问题的,现在勇哥换成了halcon12就出了内存异常问题。经过实验,我发现另一个成员函数UnloadProcedure是可以正常使用的。MyEngine.UnloadProcedure("demo1");这个函数需要指定要重新载入的函数名字。当外部函数多的时候就比较麻烦了,但总强过完全用不了。对于这个问题,勇哥录了一个视频放在
一般的光照补偿算法结合网上的资料发现比较多的去光照不均匀算法基于二维伽马函数的光照不均匀图像自适应校正算法本文发表于北京理工大学学报该算法流程如图:将图片投影到hsv域,对亮度v进行gamma校正,然后重新融合图片,得到校正后的图片。参考网上的matlab代码clc,close all;
tic;
im=imread('srcmpp.bmp');
%im=imread('qqq.jpg');
figure;
imshow(im);
title
基于二维伽马函数的光照不均匀图像自适应校正算法相应论文:基于二维伽马函数的光照不均匀图像自适应校正算法http://journal.bit.edu.cn/zr/ch/reader/create_pdf.aspx?file_no=20160216&year_id=2016&quarter_id=2&falg=1该文的算法流程如下图所示:实现工具:matlab2013a.效果图:emmmm还原出来没有论文中效果那么好。。。。。。与其他传统方法相比gamma校正直方图均衡ret