 少有人走的路
少有人走的路一、边缘提取
1、设置ROI兴趣区域
2、快速二值化,并连接相邻区域。
这样做的目的是进一步减少目标区域,通过二值化将目标区域大概轮廓提取出来
3、提取最接近目标区域的轮廓
常用函数有boundary,gen_contour_region_xld
boundary(获取一个区域的边界)
Region (input_object) Regions for which the boundary is to be computed. 区域
RegionBorder (output_object) Resulting boundaries. 输出的边界
BoundaryType (input_control)
Boundary type.边界类型
Default value: 'inner'
List of values: 'inner', 'inner_filled', 'outer'
linner 内边界。
inner_filled 内边界上的孔。
outer 外边界。
gen_contour_region_xld(生成区域的XLD轮廓)
4、根据自需求提取需要的初步轮廓
5、将初步提取的初步轮廓进行膨胀操作
6、将膨胀后的区域和原图进行减操作(在这步之前有可能需要对原图进行高斯滤波)。这样就能得到只有边缘的真实图像
7、用canny或其他算子(根据需要)提取亚像素轮廓,一般使用edges_sub_pix函数
8、处理和计算
得到真实的边缘XLD后你可能需要进一步处理得到你想要的线、弧等。
你可能用到的函数segment_contours_xld(分割) union_collinear_contours_xld(联合相邻或相同
角度直线)select_contours_xld(提取想要的轮廓)smooth_contours_xld(平滑轮廓) union_cocircular_contours_xld(联合相同圆)
等等。得到轮廓后如果你不知道怎么处理后得到你想要的东西(线、弧、圆、角、矩形)你都可以将轮廓转化为点,然后用点集合来拟合任何你想要的东西。
二、BLOB分析检测
(1)应用ROI,可以使Blob分析加速。
(2)匹配ROI区域或图像,详将GUIDEIIB以形状为基础的匹配。
(3)校正图像<经常用来去除镜头畸变或把图像转换到参考点视角,如双目视觉时的图像校正>
(4)图像前处理
(5)引用分割参数
(6)分割图像
(7)区域处理
(8)特征提取
(9)把提取的结果转换到世界坐标中
(10)结果可视化。
相机的标定和矫正不在本篇的学习之中。直接讲提取BLOB
1、一般先使用均值滤波去噪
2、利用去噪图像与平滑图像的OFFSET提取区域边缘,常见函数dyn_threshold
3、提取连通域dyn_threshold
4、根据形状或是灰度等特征来提取你想要的blob。
另一种方法就是分水岭算法
watersheds (ImageGauss, Basins, Watersheds)/
还有的图形更简单直接二值化就可以啦
bin_threshold (Fin, Dark) //分割图像,输出Dark区域,Fin已经被处理为区域// 老版本算子
binary_threshold (Green, Region, 'max_separability', 'dark', UsedThreshold) 新版本算子
connection(Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 50000, 999999)
fill_up (SelectedRegions, RegionFillUp)
difference (Fin, Dark, Background) //计算Fin与Dark两个区域的补集//
还有个函数应该说是让你高兴还是沮丧呢,以为一个函数就可以直接提取你想要的,但是参数很难调整
lines_gauss(Image, Lines, 6, 0.3, 0.5, 'light', 'true', 'gaussian', 'true')
三、赃物检测
1、得到两个不同高斯标准差的高斯积卷
2、对原始图像进行傅里叶变换'to_fre'
3、用之前的积卷对图像做积卷滤波
4、傅里叶反变换‘from_fre’
四、不规则图形的转换,shape_trans
region操作:
选择相应区域
select_shape(regions,output,'select type',..requirements)
计算相应区域的面积,中心坐标:
area_center(regions,area,row,column)
不规则区域的转换:
shape_trans(region,regiontrans,type)
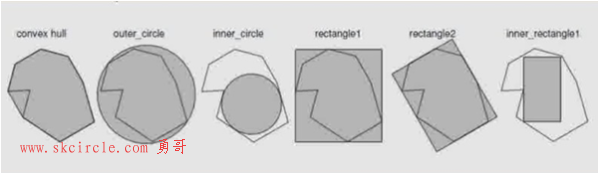
convex hull凸包围(由外向内包围)
outer_circle 外圆(能够包括对象的半径最小的圆形)
inner_circle 内圆
rectangle1 正矩形
rectangle2 最小包围矩形
inner_rectangle1 最大内矩形
---
参考文献
https://blog.csdn.net/C_gyl/article/details/96326913




")
")
常用的6种方法")
 封装运动功能")



:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")


Qt Widgets Designer界面设计器和界面应用")





