 少有人走的路
少有人走的路上一讲叙述了点云模型的调平工作
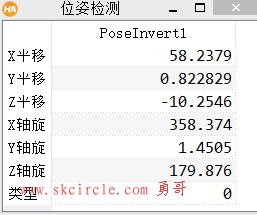
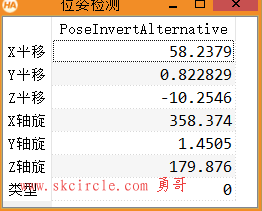
大家可以发现在调平模型的时候,基本都使用了姿态反转这个操作(pose_invert)
本文详细描述点云模型姿态调正的细节,并与矩阵形式调整点云模型姿态做对比
一.对姿态进行翻转
用姿态调整点云
这里介绍一个自己调整点云模型位姿的方式
二.用矩阵形式对点云模型姿态调整
,
用矩阵调整点云
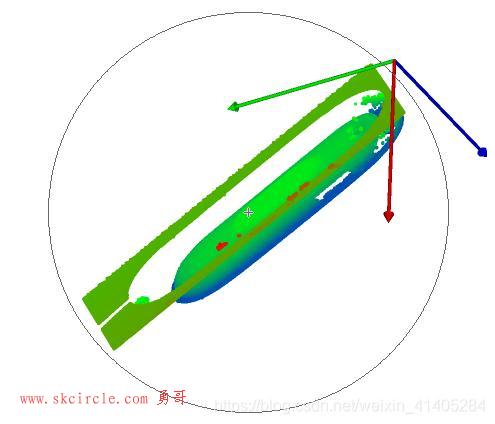
姿态翻转前
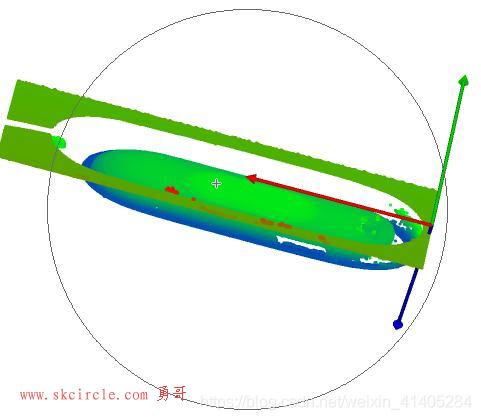
姿态翻转后
转载自:
https://blog.csdn.net/weixin_41405284/article/details/107140557
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")
:功能介绍")






Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





