 少有人走的路
少有人走的路(一)伺服驱动器适配电机编码器
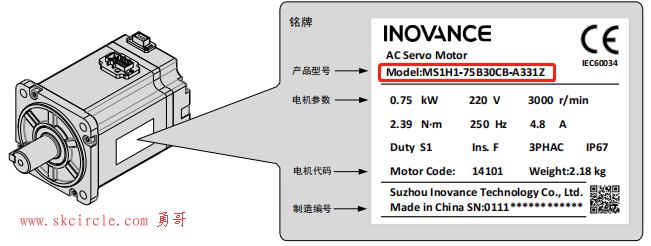
SV660P匹配绝对值编码器时,需要设置电机编号 H00-00=14101,
根据实际应用情况设置 H02-01。初次接通电池时会发生Er.731(编码器电池故障),
需要设置H0D-20=1 复位编码器故障,再进行原点复归操作。
电机铭牌上可以看到电机的编码器信息。
绝对值相关的设置如下:
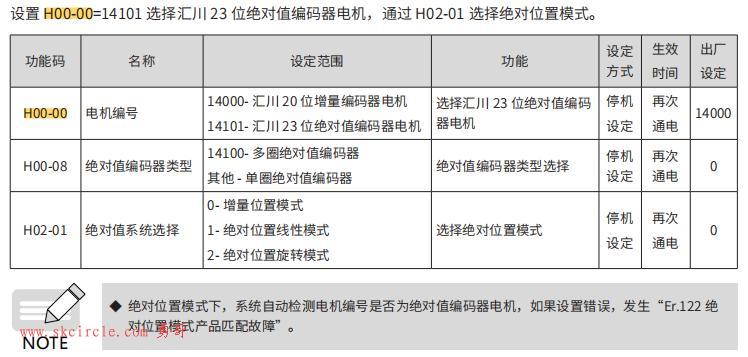
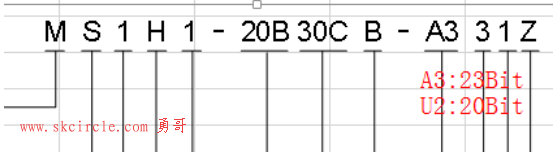
(1) 23位编码器
1. 首先设置H0000=14101,设置完成后断电重启生效
2. 设置H0231=1,恢复出厂设置,目的在于把23Bit的电子齿轮比写入伺服,如果不方便恢复出厂设置手动到设置:H0507=8388608/H05111=8388608/H0A10=25165824
3. 设置H0201=0(不带电池) =1(带电池,丝杠负载)=2(带电池旋转负载)
(2) 20位编码器
1. 新机(IS620)出厂默认,不需要设置(如果其他原因需要设置请参考[2][3][4])
2. 首先设置H0000=14000,设置完成后断电重启生效
3. 设置H0231=1,恢复出厂设置,目的在于把20Bit的电子齿轮比写入伺服,如果不方便恢复出厂设置请手动设置:H0507=1048576/H05111=1048576/H0A10=3145728
4. 设置H0201=0(不带电池)
(二) 增益调节
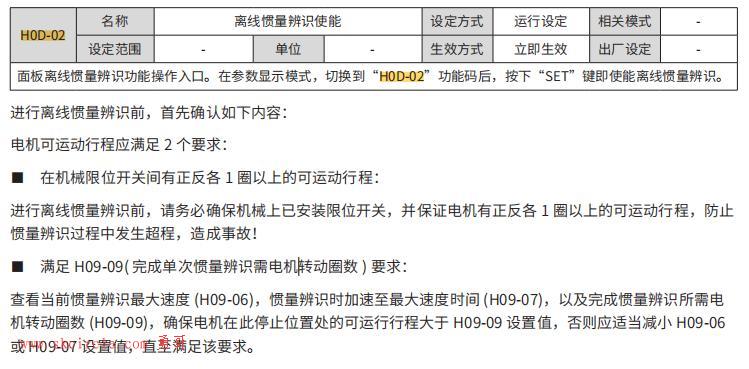
(1)离线惯量辨识
即自动计算出惯量值。
选择 H0D02 后 通过按面板上下键来使电机转动 此时面板显示的数就是惯量比,多按几次后,面板的数不再变化后长按SET 键 ,当显示SAVE后,松开SET键,辨识完成;
此操作马达会自动正反转一圈,因此要注意行程是否会撞机。
H0D-02说明如下:
(2)刚性调节
设置H0900=1
设置H0901=根据现场设定,默认是12,电机上使能后觉得电机出力小了,用手能推动的话就设置大一点,上使能后觉得电机声音大就设置小一点
马达刚性没设置好的现象,勇哥总结了几条:
刚性过大,一动起来立刻造成马达来回震荡停不下来。
震荡的原因是轴冲过头,然后自己再纠正,循环往复,所以无法停止。
轴出现异响,这种也是刚性调节过大的原因,注意这种异响在低速与高速时都可能出现。
用手搬动轴给个外力,可以搬动电机,一松手像弹簧一样缩了回来,这种也是刚性过小
在高速运动停止下来的时候,左右晃几次才停下。这种也是刚性太弱的表现。
刚性太弱,就会无力让电机立刻干脆的停下。
刚性低的话好比在伺服电机的联轴器改成扭转弹簧然后再输出。
眼看的结果就是,伺服已经转到位了但是由于负载作用,弹簧的变形使得输出端未达到伺服转动的角度。总是迟钝一点才来到。
感觉就是明明已经给指令了他还不走。明明指令停了。还要多走一段。
但是不等于定位不准。
马达刚性好,则电机响应会很快,停止也很干脆,一定的外力作用也可以稳稳的把电机hold住。
(3)共震抑制
如果发现电机运动到某个特定位置声音突然变大,请设置H0902=2后再运动到这个位置来回运动,待声音消失后再观察H0902,如果H0902不等于0,则手动改成0;
(三) 其它参数




")
")
常用的6种方法")
 封装运动功能")

:QWidget,QMainWindow")


Lungchain支持的Tools")
基本使用:Chains(链)")
创建一个聊天智能体")







