 少有人走的路
少有人走的路勇哥注:
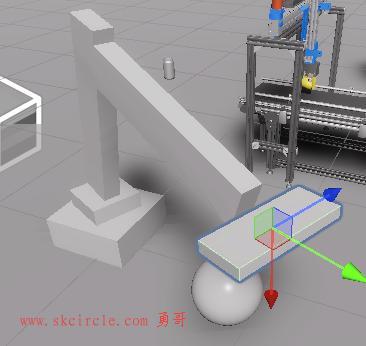
工业机器人使用两个约束就可以实现动作,一个是Aim Constraint,一个是Rotation Constraint。
两种约束,都是“注视”一个目标,目标移动,则机器人凡是添加了约束的关节都会联动。
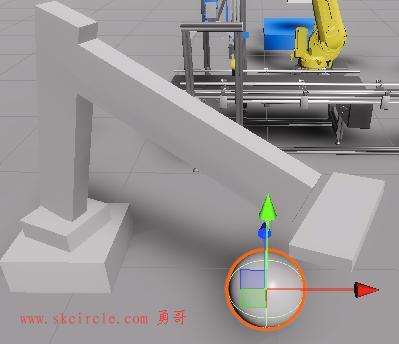
下面是简易的机器人演示:
只实现了三个关节的动作。
球体是Aim Constraint的关注物体。
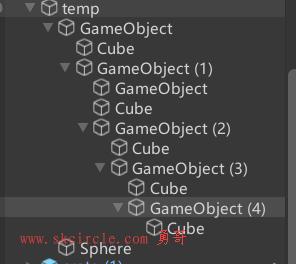
Rotation Constraint的关注物体是GameObject(1)-->GameObject,是个空对象。
三个关节添的的Aim Constraint设定如下:
1。GameObject(1)

2。GameObject(2)
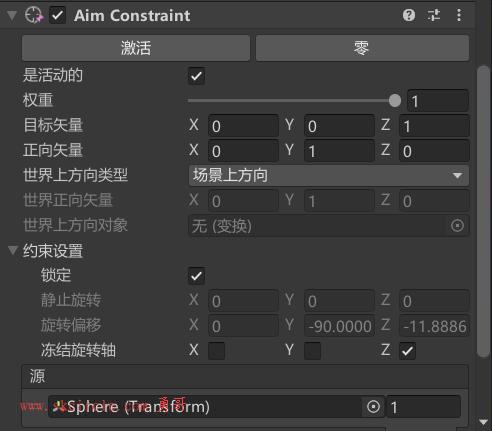
3。GameObject(3)

旋转约束Rotate Constraint的设置如下:

旋转约束的效果如下:
我们拉动关注物体球体的高度,可以看到第三关节的角度始终保持一致。
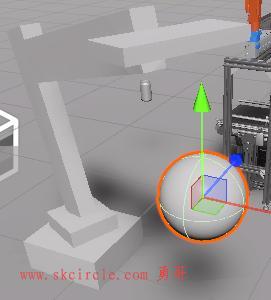
第二关节和第三关节的旋转在你添加约束前,应该是沿着红圈所在位置进行旋转。
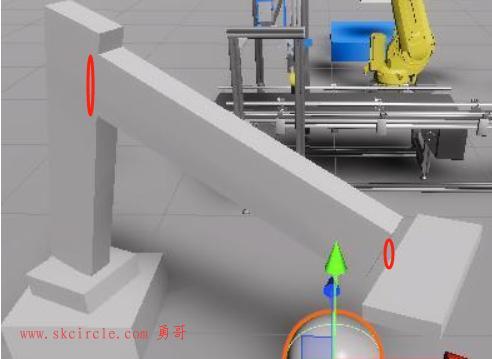
你可能做不到这一点。
第二关节是GameObject(3)-->Cube
想实现这一种,秘密在于你应该交替调节GameObject(3)和它的子对象Cube的位置,然后测试旋转GameObject(3)。
也就是说你调节了子对象,会对父对象的旋转中心产生影响。
一般会3dsmax的人,这种情况下会想到去调节旋转对象的旋转中心,但是在unity中,你是找不到这个的。
你可以多试试,相信会成功的。
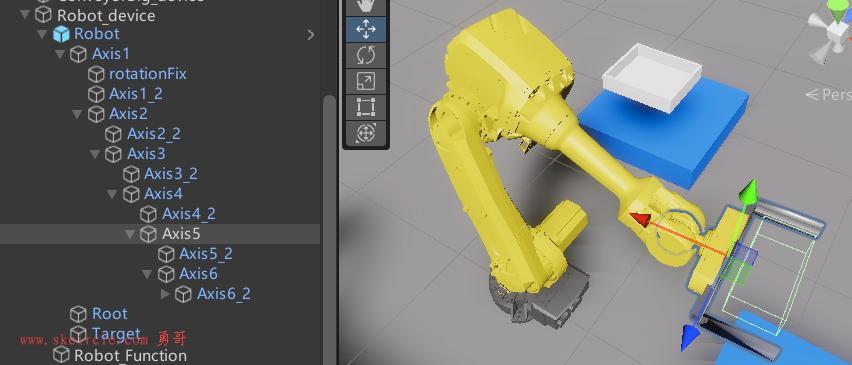
下面是六轴机器人的定义。
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:

本帖最后由 勇哥,很想停止 于 2024-11-01 08:19:35 编辑 

")
")
常用的6种方法")
 封装运动功能")



")
基本使用:Chains(链)")







