 少有人走的路
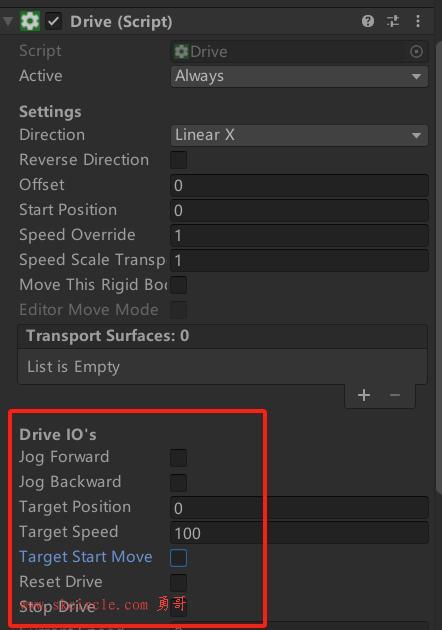
少有人走的路Drive IO's的这几个参数,勇哥发现其实有妙用。
(1)Jog Forward/Jog Backward 前后运动
这两个我们在播放时,可以用于测试轴向前、向后运动。
但其实,它可以用来做jog运动的!
那个Target Speed 正好做为jog运动的速度参数。
使用的时候,我们弄几个PLC Output对应Jog Forward和Jog Backward,在代码中收到信号后就对Jog Forward或者Jog Backward赋值就可以了。
(2)Stop Drive 停止运动。
配合PLC Output,可以在任何情况下停止轴运动。
(3)Target Start Move 开始运动
初看这个参数莫明其妙,后来发现它有妙用。
它的作用是让轴回到0的位置,速度同样可以由Target Speed来控制。
如果我们把轴的0的位置放在原点感应器的位置上,那不就可以用它来实现回原吗!!!
这个就是它的妙用。省去了我们自己去开发回原函数的麻烦。
Reset Drive这个也是让轴回到0的位置,但是它没有动作过程,直接跳到0的位置。这个意义就不大了。
勇哥注:2024.12.11
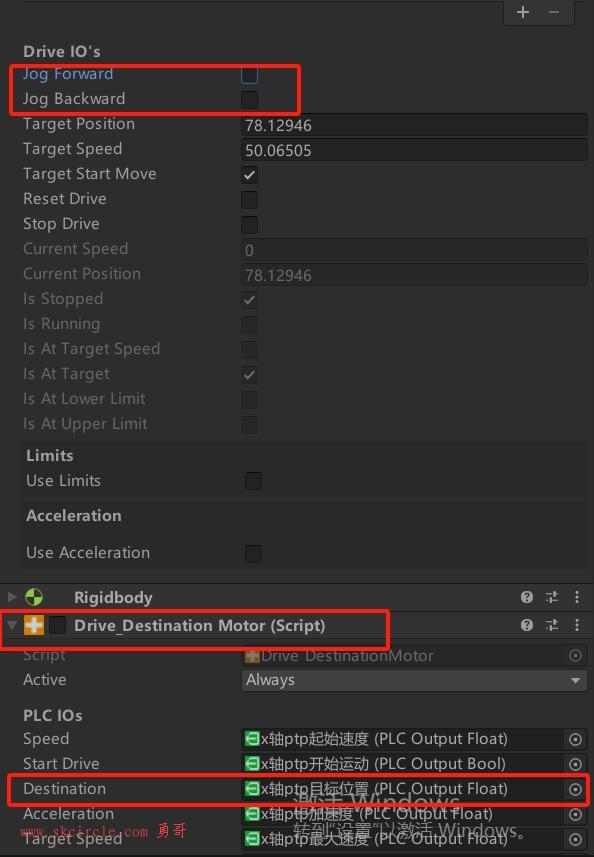
我又误人子弟了,这个Target Start Move并不可以做为简易回原点。
它表示的是:移动到运动前的起始位置
当你播放后,轴当前的位置,就是运动前的起始位置。(而我们故意在unity的编辑器中把轴的初始位定在的原点感应亮的位置)
因此这个时候,你通过jog Forward/Backward动了位置后,再勾选Target Start Move后,就回到了运动前的起始位置了。
这样看上去确实像回了原点。
但是,如果你通过各种运动方式,如Drive_Destination,动一次后,起始位置就变了。
起始位置总是当前运动完成后的位置(注意通过jog forward运动的不算,必须是Drive_Destination之类的运动方式动过了才算),这样就相当于原点的位置在变化。
因此想实现回原点,必须配合原点、限位感应器来编写自定义的逻辑。




")
")
常用的6种方法")
 封装运动功能")

:功能介绍")
:入口函数,运算符,模块与包,py文件 ,基础数据类型,列表")
:运行时api的说明")



Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





