 少有人走的路
少有人走的路概念
——————————————————————————————————————————
工具坐标系是把机器人腕部法兰盘所握工具的有效方向定为Z轴,把坐标定义在工具尖端点,所以工具坐标的方向随腕部的移动而发生变化。
工具坐标的移动,以工具的有效方向为基准,与机器人的位置、姿势无关,所以进行相对于工件不改变工具姿势的平行移动操作时最为适宜。
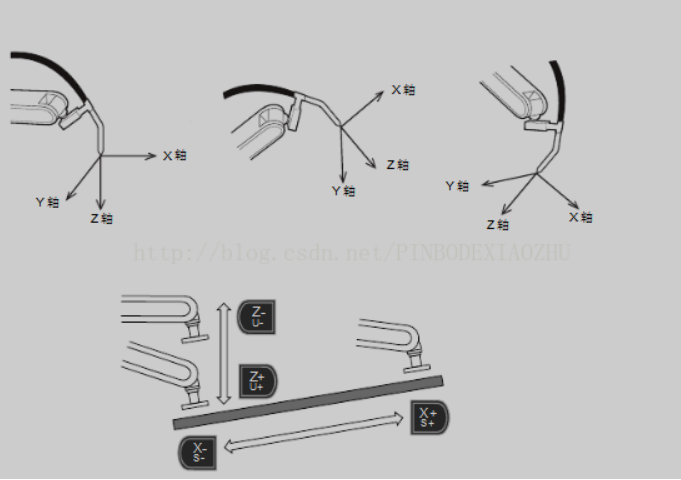
建立了工具坐标系后,机器人的控制点也转移到了工具的尖端点上,这样示教时可以利用控制点不变的操作方便地调整工具姿态,并可使插补运算时轨迹更为精确。所以,不管是什么机型的机器人,用于什么用途,只要安装的工具有个尖端,在示教程序前务必要准确地建立工具坐标系。
引用一篇更详细的教程如下:
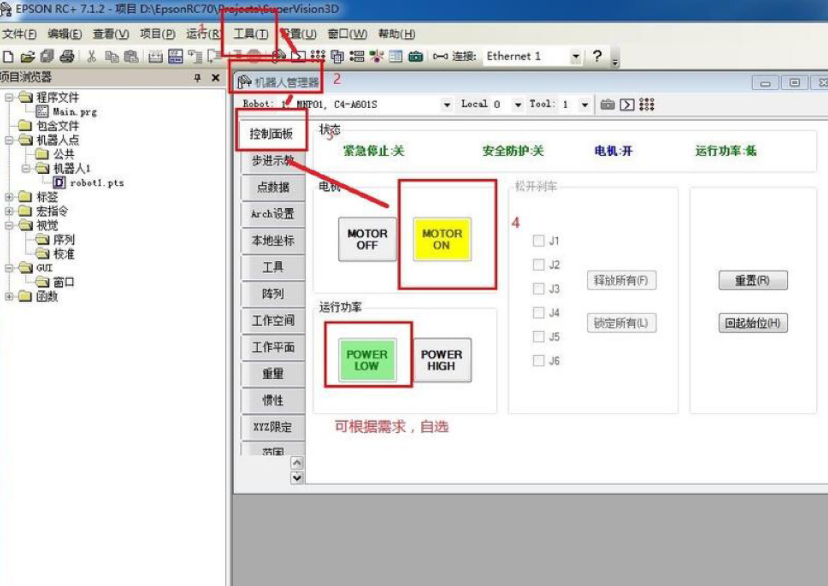
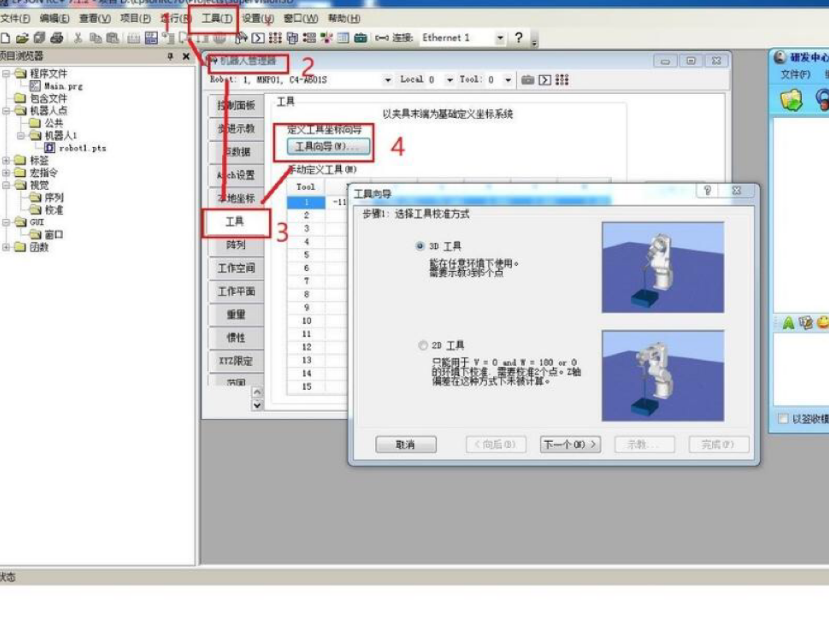
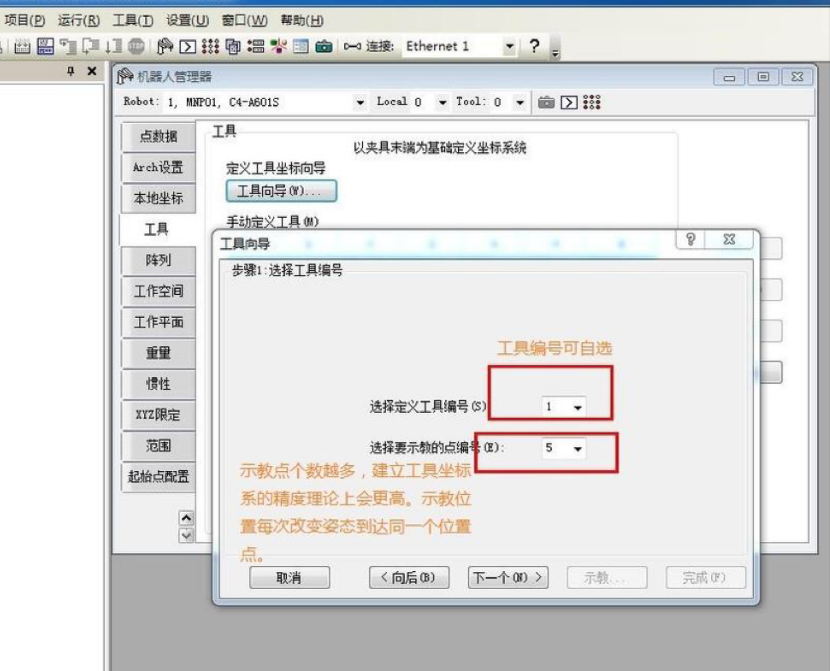
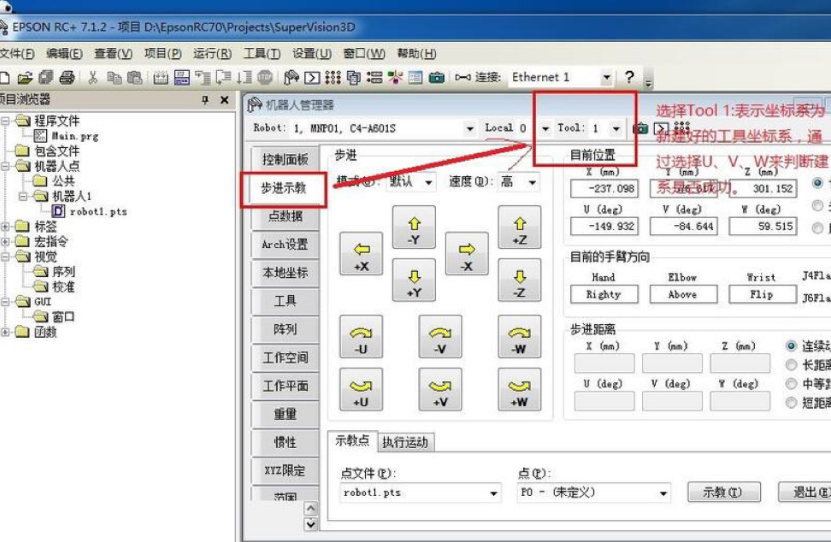
1,打开EPSON RC 软件打开robot manager
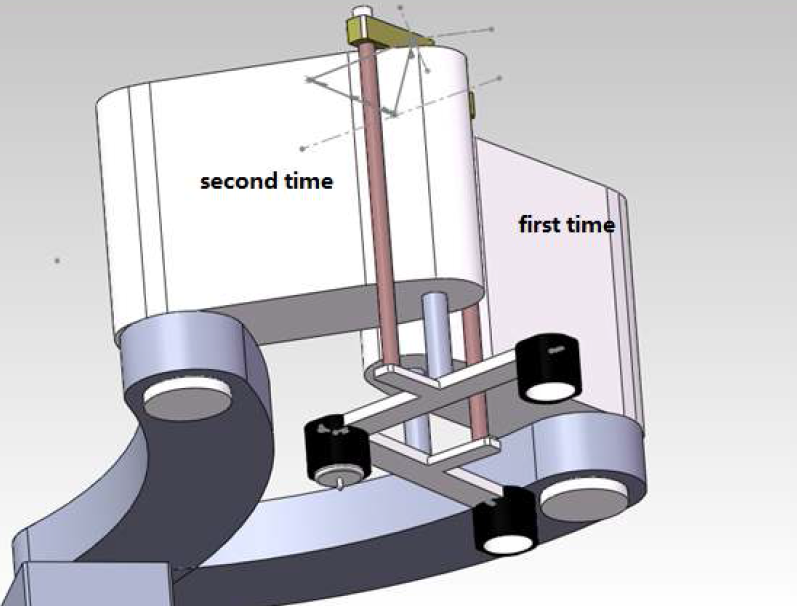
2,放置一个带墨点胶布在传输带的vision中央区域并固定.
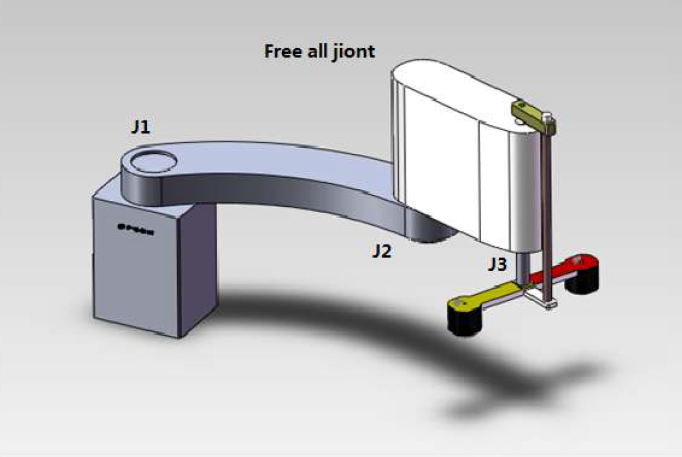
3,让所有关节处于自由状态.
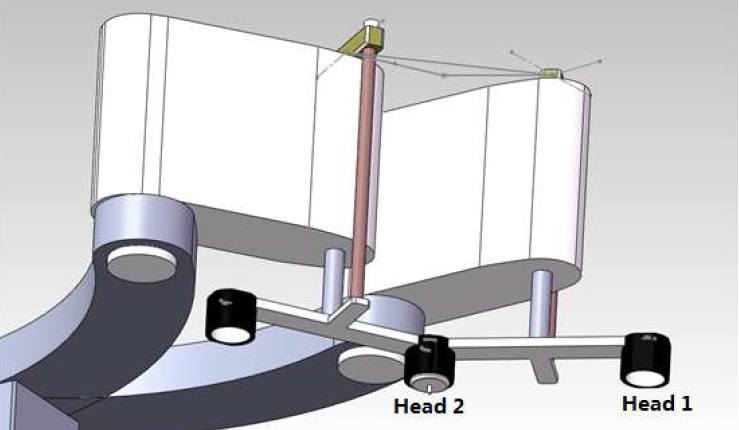
4,打开Head1真空,将矫正用金属饼吸附到Head1上.
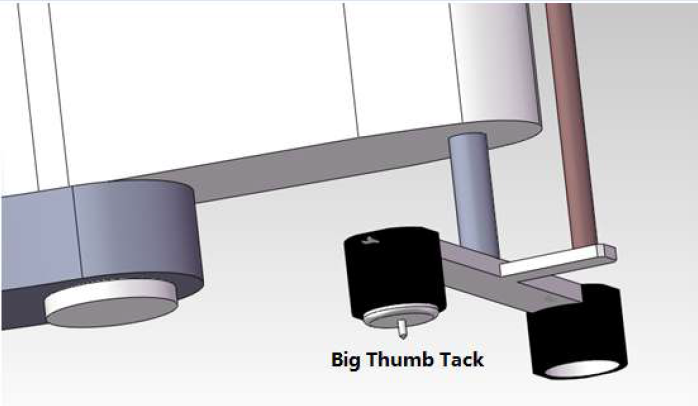
5, 将金属饼中心尖端放到墨点中央,确认是中央,点击保存。
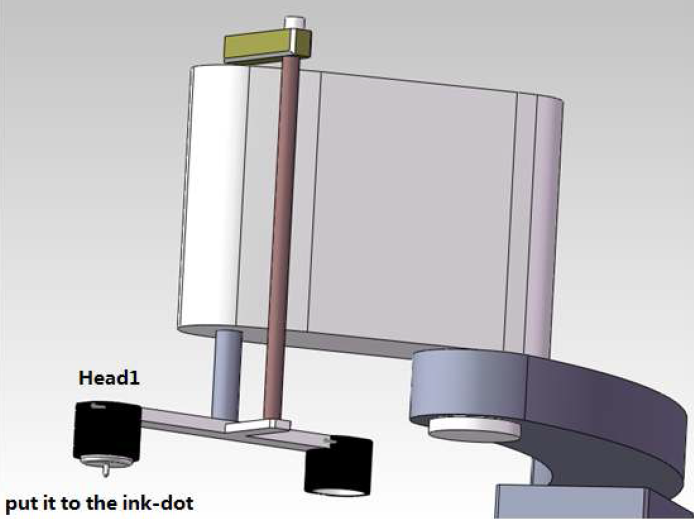
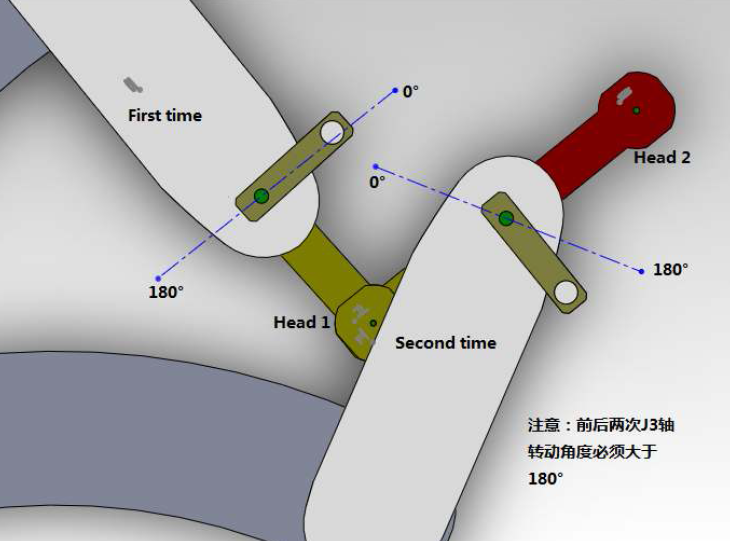
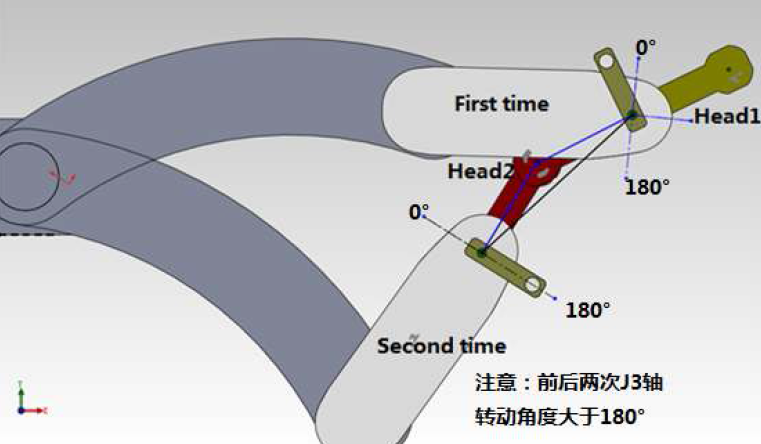
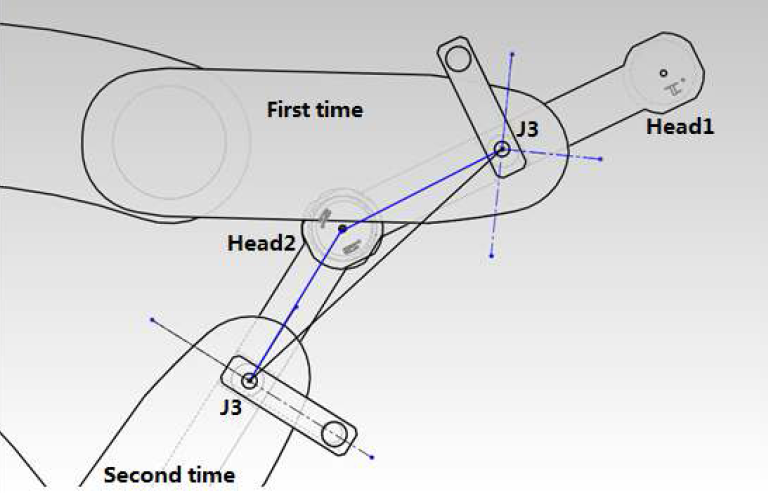
6,旋转J3大于180°并配合旋转J1,J2,再次将Head1上尖端中心放到墨点中央,再次点击保存。
注意:前后两次J3旋转角度必须大于180°,原因是:矫正区域必须大于活动区域,而且大角度的旋转更能准确计算结果。类似的有mm和pixel转换的矫正,要求矫正区域必须大于我们运算实用的区域。
矫正原理和目的如下:
1、为了物料能准确抓取,需要robot的Head准确找到Part的中心位置。
2、J3轴的中心位置P(X,Y)可以根据J1,J2轴的角度和两个固定臂长准确运算
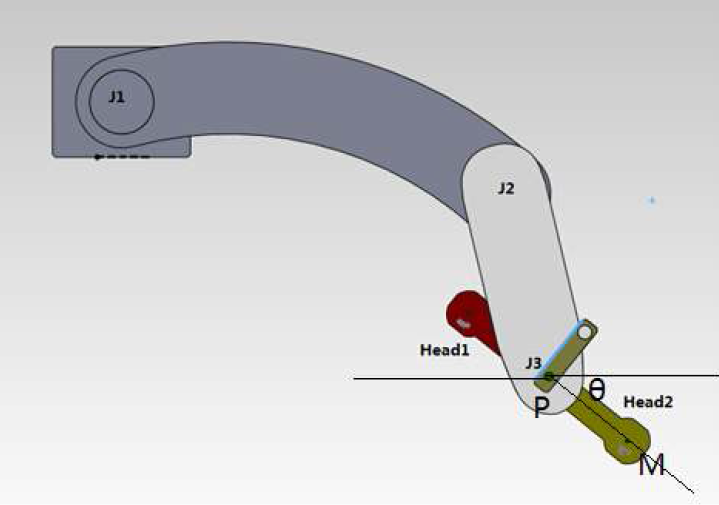
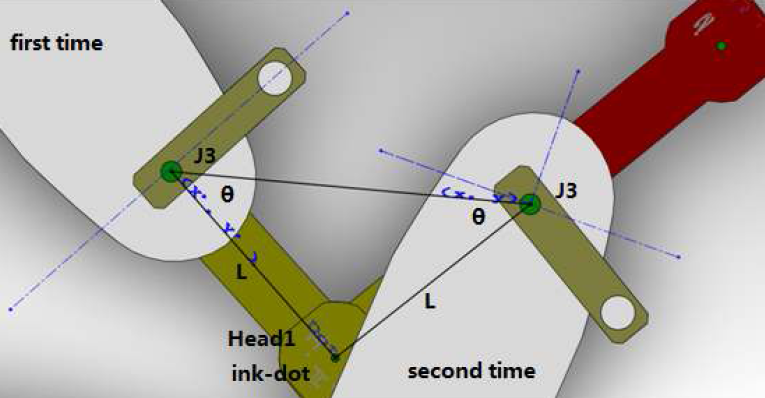
3、但是Head1的位置M需要在P的基础上计算出来,它的确定需要J3的角度U和L(Head1到J3轴中心距)
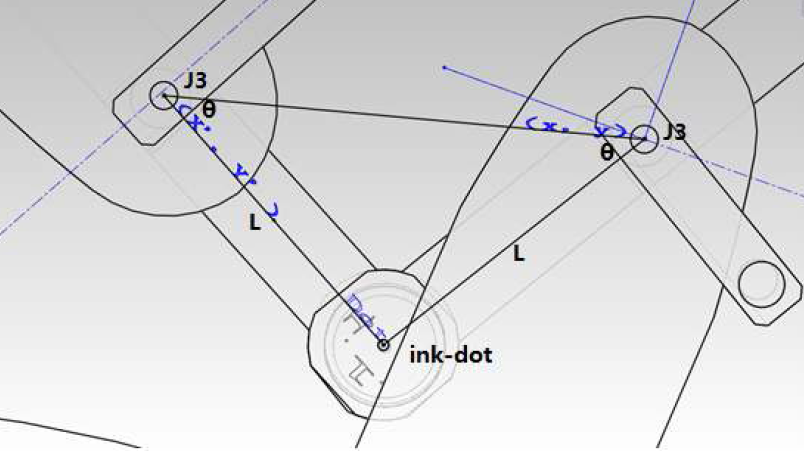
4、已知坐标 (x,y) ,(x’,y’) ,两个边相等,都等于Head1到J3轴中心距L,所以两个底角相等令其等于θ,且两个角的和可以根据robot的J3轴两次矫正的角度把”U”计算出来。目的就是出计算Head1和Head2的安装支架安装在了J3的哪个角度上了,以便让J3角度和Head的实际角度产生对应关系。
5、发现产品中心位置后,利用M和P点的关系得出P点位置,第一步robot直接走到P位置,第二步就是旋转J3一个准确角度进行抓取。
总结:其实Tool就是robot的假肢,系统最远只能识别到J3点坐标和角度,这个矫正就类似于一个拥有假肢的人,要在一个仓库拿一件东西,这个人可以通过行走到达任何一个位置,而且清晰的知道自己的位置,但是抓取时不知道假肢如何准确操作,他需要面对物品抓取一次,然后在换个姿势(如背对物品)再抓取一次,通过两次抓取完全熟悉假肢的使用。
同理对Head2矫正操作原理一样:
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")






Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





