 少有人走的路
少有人走的路已知直线的起始端点与终止端点,移动到指定点的位置。
这个必须要考虑直线有可能是任意角度的问题。
#代码如下:
要注意,下面的代码需要安装netMarketing类库。
using HalconDotNet;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace WindowsFormsApplication1
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
private void button1_Click(object sender, EventArgs e)
{
double x1=0,y1=0,x2=0,y2=0;
MoveLine(3182, 2449, 3114.10, 1860.05, 2962.10, 3420.20, out x1, out y1, out x2, out y2);
richTextBox1.Text = string.Format("{0},{1},{2},{3}",x1,y1,x2,y2);
}
/// <summary>
/// 移动线段到指定点
/// </summary>
/// <param name="lineStartPointRow">点行</param>
/// <param name="lineStartPointCol">点列</param>
/// <param name="lineStartPointRow">待移动线段起点行</param>
/// <param name="lineStartPointCol">待移动线段起点列</param>
/// <param name="lineEndPointRow">待移动线段终点行</param>
/// <param name="lineEndPointCol">待移动线段终点列</param>
/// <param name="resultLineStartPointRow">移动后线段起点行</param>
/// <param name="resultLineStartPointCol">移动后线段起点列</param>
/// <param name="resultLineEndPointRow">移动后线段终点行</param>
/// <param name="resultLineEndPointCol">移动后线段终点列</param>
private void MoveLine(double pointRow, double pointCol, double lineStartPointRow, double lineStartPointCol, double lineEndPointRow, double lineEndPointCol, out double resultLineStartPointRow, out double resultLineStartPointCol, out double resultLineEndPointRow, out double resultLineEndPointCol)
{
resultLineStartPointRow = 0;
resultLineStartPointCol = 0;
resultLineEndPointRow = 0;
resultLineEndPointCol = 0;
//首先得到垂点
HTuple pitchRow, pitchCol;
HOperatorSet.ProjectionPl(pointRow, pointCol, lineStartPointRow, lineStartPointCol, lineEndPointRow, lineEndPointCol, out pitchRow, out pitchCol);
//得到垂点距离起点A的距离
HTuple distanceA;
HOperatorSet.DistancePp(pitchRow, pitchCol, lineStartPointRow, lineStartPointCol, out distanceA);
//得到垂点距离终点B的距离
HTuple distanceB;
HOperatorSet.DistancePp(pitchRow, pitchCol, lineEndPointRow, lineEndPointCol, out distanceB);
//根据移动位置点,距离A,和线段角度求结果线段的起点
double angle;
HTuple temp;
HOperatorSet.AngleLx(pitchRow, pitchCol, lineStartPointRow, lineStartPointCol, out temp);
angle = (double)temp;
double drow = 0;
double dcolumn = 0;
if (0 <= angle * (180 / Math.PI) && angle * (180 / Math.PI) <= 90)
{
dcolumn = Math.Abs(((double)distanceA) * Math.Cos(angle));
drow = Math.Abs(((double)distanceA) * Math.Sin(angle));
resultLineStartPointRow = pointRow - drow;
resultLineStartPointCol = pointCol + dcolumn;
}
else if (angle * (180 / Math.PI) > 90 && angle * (180 / Math.PI) <= 180)
{
dcolumn = ((double)distanceA) * Math.Cos((Math.PI - angle));
drow = ((double)distanceA) * Math.Sin((Math.PI - angle));
resultLineStartPointRow = pointRow - drow;
resultLineStartPointCol = pointCol - dcolumn;
}
else if (angle * (180 / Math.PI) < 0 && angle * (180 / Math.PI) >= -90)
{
dcolumn = ((double)distanceA) * Math.Cos(Math.Abs(angle));
drow = ((double)distanceA) * Math.Sin(Math.Abs(angle));
resultLineStartPointRow = pointRow + drow;
resultLineStartPointCol = pointCol + dcolumn;
}
else if (angle * (180 / Math.PI) < -90 && angle * (180 / Math.PI) >= -180)
{
dcolumn = Math.Abs(((double)distanceA) * Math.Cos(angle + Math.PI));
drow = Math.Abs(((double)distanceA) * Math.Sin(angle + Math.PI));
resultLineStartPointRow = pointRow + drow;
resultLineStartPointCol = pointCol - dcolumn;
}
//根据移动位置点,距离B,和线段角度求结果线段的终点
HOperatorSet.AngleLx(pitchRow, pitchCol, lineEndPointRow, lineEndPointCol, out temp);
angle = (double)temp;
if (0 <= angle * (180 / Math.PI) && angle * (180 / Math.PI) <= 90)
{
dcolumn = Math.Abs(((double)distanceB) * Math.Cos(angle));
drow = Math.Abs(((double)distanceB) * Math.Sin(angle));
resultLineEndPointRow = pointRow - drow;
resultLineEndPointCol = pointCol + dcolumn;
}
else if (angle * (180 / Math.PI) > 90 && angle * (180 / Math.PI) <= 180)
{
dcolumn = ((double)distanceB) * Math.Cos((Math.PI - angle));
drow = ((double)distanceB) * Math.Sin((Math.PI - angle));
resultLineEndPointRow = pointRow - drow;
resultLineEndPointCol = pointCol - dcolumn;
}
else if (angle * (180 / Math.PI) < 0 && angle * (180 / Math.PI) >= -90)
{
dcolumn = ((double)distanceB) * Math.Cos(Math.Abs(angle));
drow = ((double)distanceB) * Math.Sin(Math.Abs(angle));
resultLineEndPointRow = pointRow + drow;
resultLineEndPointCol = pointCol + dcolumn;
}
else if (angle * (180 / Math.PI) < -90 && angle * (180 / Math.PI) >= -180)
{
dcolumn = (Math.Abs((double)distanceB) * Math.Cos((angle + Math.PI)));
drow = (Math.Abs((double)distanceB) * Math.Sin((angle + Math.PI)));
resultLineEndPointRow = pointRow + drow;
resultLineEndPointCol = pointCol - dcolumn;
}
}
}
}
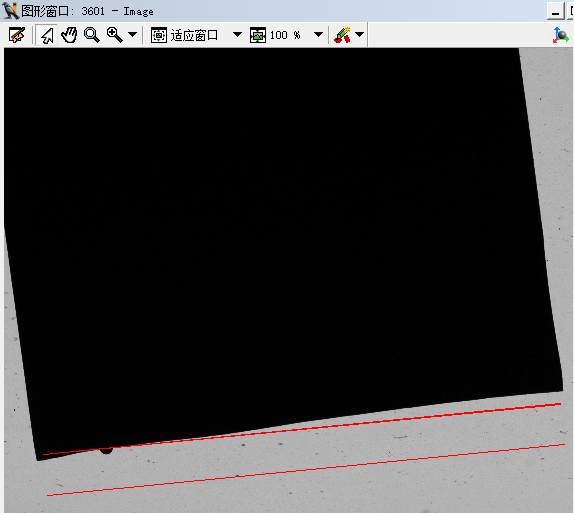
为了验证这个结果,编写halcon代码如下:
read_image (Image, 'C:/Users/Administrator/Desktop/尺寸机/建模/395876G-3-HWR - 副本2.bmp')
dev_open_window_fit_image(Image, 0, 0, -1, -1, WindowHandle)
dev_display(Image)
dev_set_color('green')
disp_line(WindowHandle, 3114.10, 1860.05, 2962.10, 3420.20)
disp_line(WindowHandle, 3238.201393,1872.1407686,3086.20139298163,3432.29076802436)结果如下图所示:
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")




Qt Widgets Designer界面设计器和界面应用")


:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





