 少有人走的路
少有人走的路一台Epson四轴机器人,正常情况下应该是点动X轴时1轴转动,现在发现变成2轴前伸(即原来Y轴点动的效果)。
真是奇了怪。勇哥后来发现是因为机器人撞过机的原因造成的。
详细过程参见下面的资料:
计算HOFS值校准原点
当机器人原点丢失,而在原点位置机器人会与其它设备或者机构产生碰撞,无法手动将机器人推到原点位置来重新校准原点时,可以通过计算HOFS值来重新校准原点。
以LS3-401S机器人第一轴为例
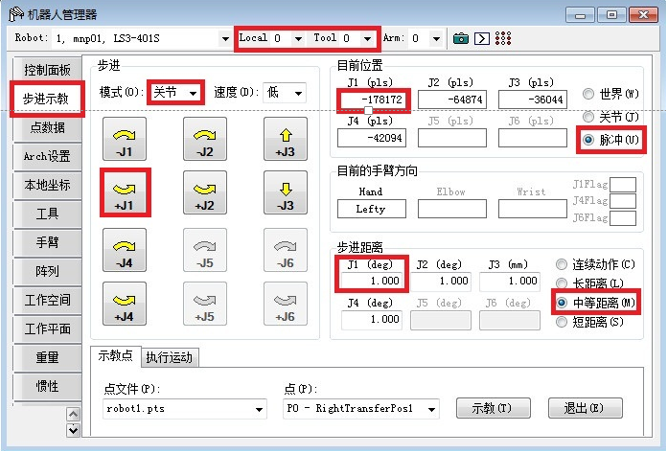
1、打开机器人管理器,点击motor on,然后选择步进示教一栏,步进模式选择关节,Local和Tool都选择0,目前位置选择脉冲,可以看到机器人当前位置的第一轴脉冲值为-178172,接着在步进距离选择中等距离,将J1的步进距离改为1.000度,然后点击一下+J1。
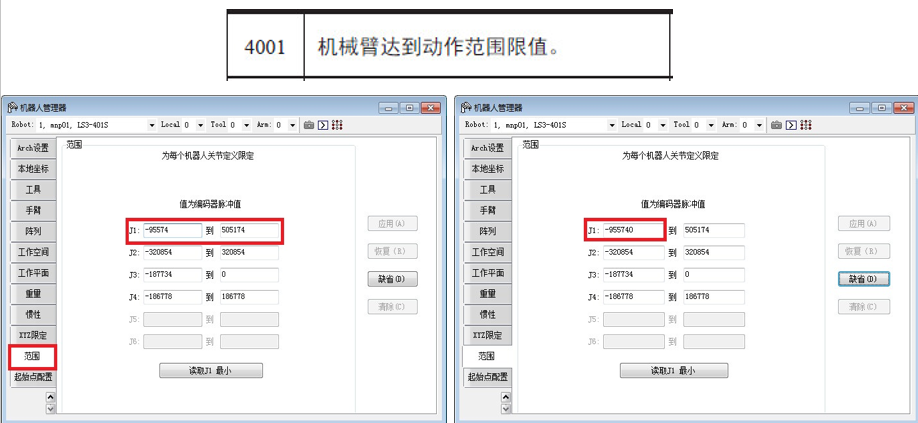
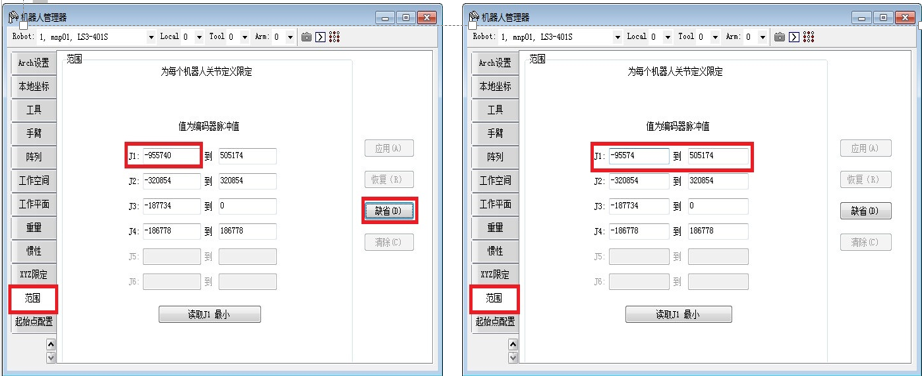
2、若点击+J1时未出现报错,则可以跳过本页继续查看下一页。若点击+J1时弹出报错4001(机械臂达到动作范围限值),则找到左侧菜单栏点击 下拉,选择范围一栏,将J1的脉冲值修改为大于机器人当前位置脉冲值-178172,例如将-95574改为-955740,点击应用即可,然后选择步进示教一栏,点击一下+J1。
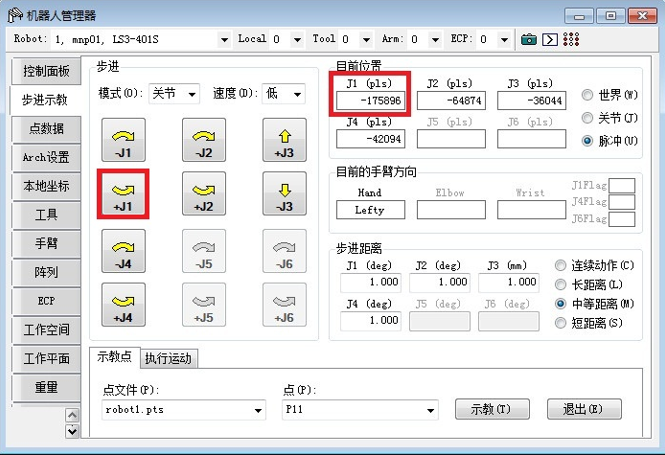
3、点击一下+J1后,查看当前位置的J1脉冲值是多少,如下图J1当前位置脉冲值为-175896,然后将当前脉冲值减去之前未偏移的脉冲值即可计算出机器人第一轴转动1度时的单位脉冲偏移量,如-175896-(-178172)=2276,得出2276是LS3-401S机器人第一轴每转动1度的单位脉冲偏移量。
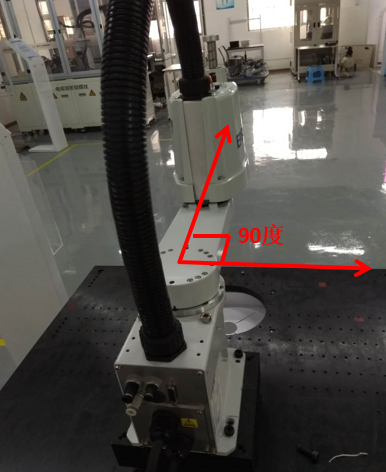
4、将机器人手动摆到与原点位置成一定已知角度的位置(没有与其它设备有碰撞的位置),例如将机器人第一轴摆到与原点位置成90度的位置,其它轴摆到各轴的原点位置,如下图所示,前面已经计算出机器人第一轴每转动1度的单位脉冲偏移量是2276,将第一轴单位脉冲值乘以已知角度得出当前位置的第一轴脉冲值,例如2276×90=204840,得到当前位置的第一轴脉冲值为204840。
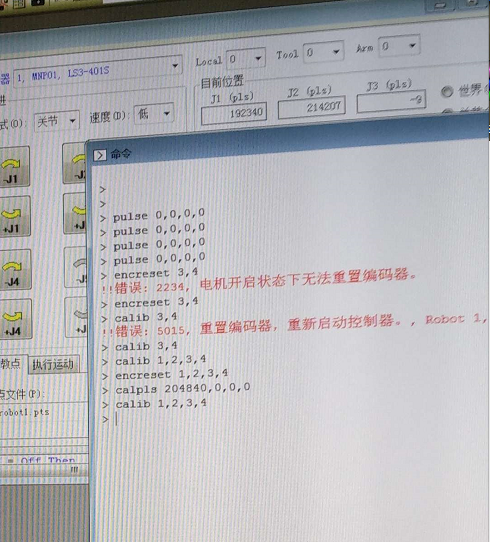
5、打开命令窗口,输入encreset 1,2,3,4后回车,接着从菜单栏选工具-控制器-重置控制器,等待控制器重启完成。重启完成后打开命令窗口,输入calpls 204840,0,0,0后回车,接着输入calib 1,2,3,4后回车,此时已完成校准原点步骤。打开机器人管理器,执行运动到生产时的点位看看是否准确,若点位不准确需重新示教点位。
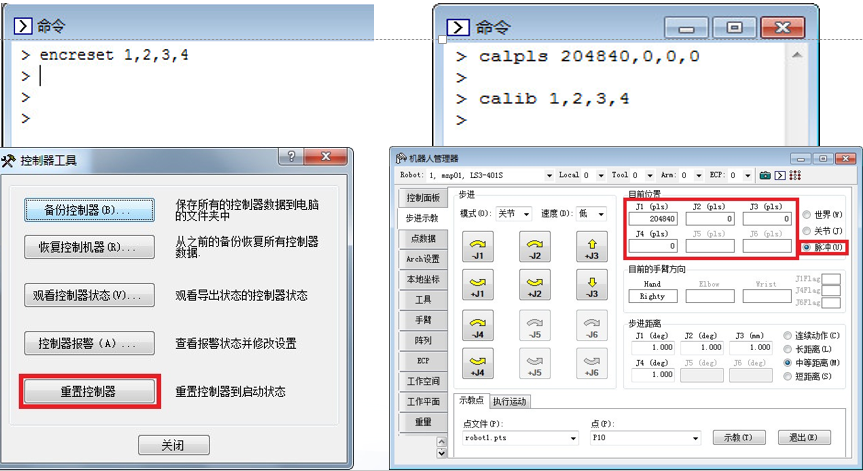
6、打开机器人管理器,选择范围一栏,点击缺省后点击应用,将之前修改过的脉冲范围值还原到机器人脉冲范围值的默认值。
这是勇哥在问题机器上实验的过程:
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")

Qt Widgets Designer界面设计器和界面应用")

:有无数组?字符串方法,读写文件,序列化,配置文件,异常处理,循环和选择,模块与包,调试手段")



:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





