 少有人走的路
少有人走的路所谓的精度是指验证标定后工具1坐标系下的特征点,转为机械坐标系后再与机器人的坐标进行差值比较,越小越好。
验证精度我们可以从三方面入手:
一是验证特征点在视野最大范围内变换位置,考虑相机畸变因素影响下对精度的影响
二是绕着特征点旋转,验证特征点的像素偏差,或者是转换后的机械坐标的偏差。
三是做放料测试,验证实际的带料取放料精度。
勇哥在本篇先讨论第一种方法。
下面是标定后的特征点的信息
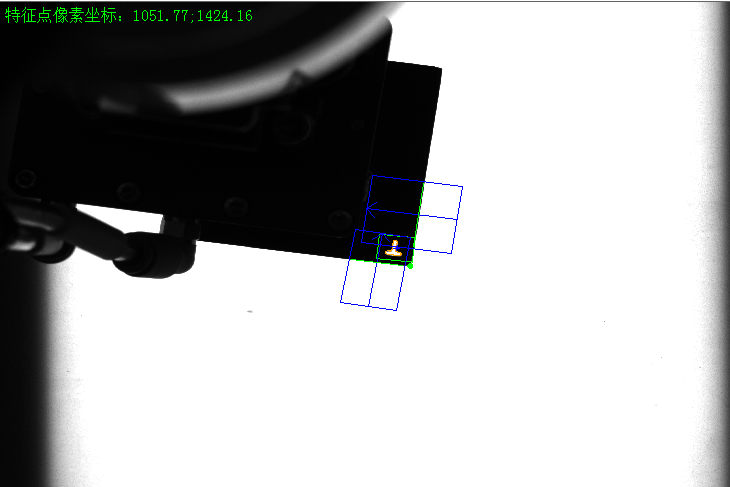
标定特征点信息 像素x:1051.772 像素y:1424.155 机械x: 371.424923596072 机械y: -111.734996552458
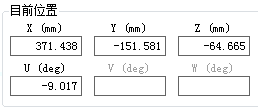
机器人的测试点坐标:
371.438 -111.746

标定精度测试结果:X偏差:0.012mm,Y偏差:0.011mm
下面移动机器人的Y轴
我们的目的是移动特征点到视野的一些最大位置,以验证在相机的畸变条件下,精度是否还可以有保证。
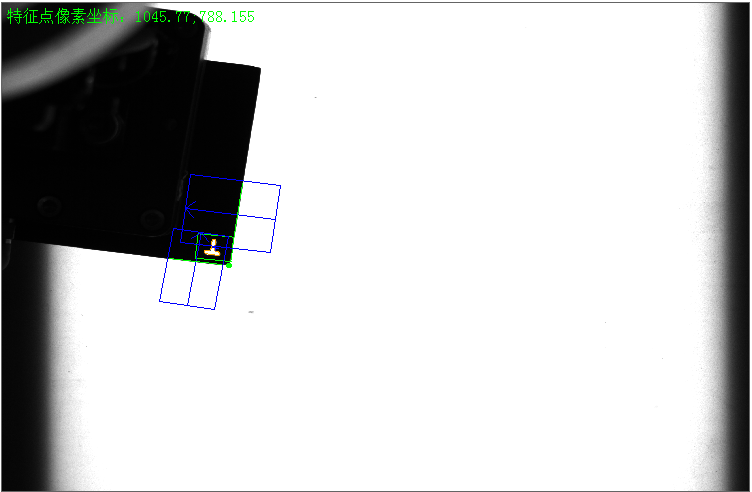
标定特征点信息 像素x:1045.772 像素y:788.155 机械x:371.451672174466 机械y: -151.589402234006
下面移动特征点到左上角
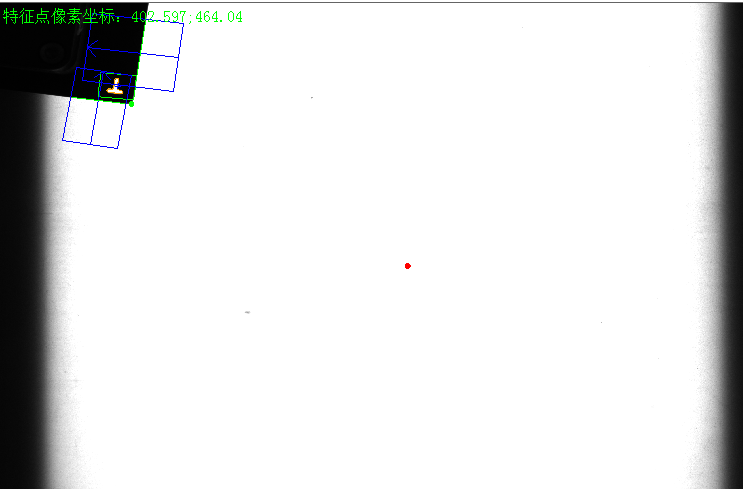
331.285 -172.408
标定特征点信息 像素x:402.597 像素y:464.04 机械x:-172.263820394142 机械y:331.311328504938
标定精度测试结果:X偏差:0.028mm,Y偏差:0.144mm
ps: 可以看到,这一轮的Y偏差就比较大了。
现在我们移动到右上角。
331.288 -55.563
标定特征点信息 像素x:420.753 像素y:2327.019 机械x:-55.5214762419306 机械y:331.269404679444
标定精度测试结果:X偏差:0.017mm,Y偏差:0.053mm
下面移动到右下角
418.593 -55.566
标定特征点信息 像素x:1812.71 像素y:2313.711 机械x:-55.5637568788774 机械y:418.594032959965
标定精度测试结果:X偏差:0.001mm,Y偏差:0.002mm
ps: 可以看到右下角效果极好。
下面移动到左下角
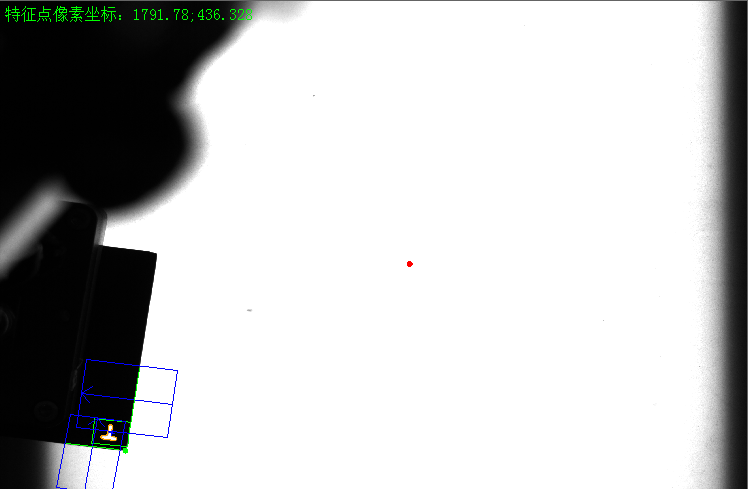
418.594 -173.467
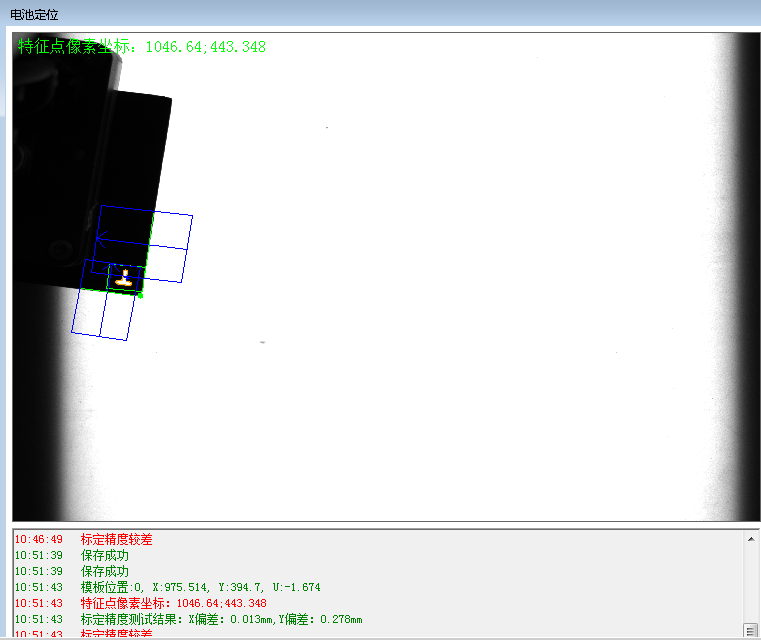
标定特征点信息 像素x:1791.782 像素y:436.328 机械x:-173.210214703332 机械y:418.471201604554
标定精度测试结果:X偏差:0.123mm,Y偏差:0.257mm
ps: 这个位置精度比较差。结论是左上角,右下角精度都比较差。按这个结果,勇哥推测在视野左边的中间地方,也应该精度较差。
下面的实验结果,果然如我所料,精度比较差。
勇哥猜测,这个现象跟相机的安装有关系,相机的成相平面与被测试平面可能有倾斜角度。
上述结论反映了一个问题,就是标定后,视野范围内存在一个最佳精度的区域。可以考虑让物料尽可能出现在这个区域内,机器人抓取时就可以获得最佳精度。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")
:功能介绍")






Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





