 少有人走的路
少有人走的路EPSON
机器人原点校准命令及用法
一. 命令
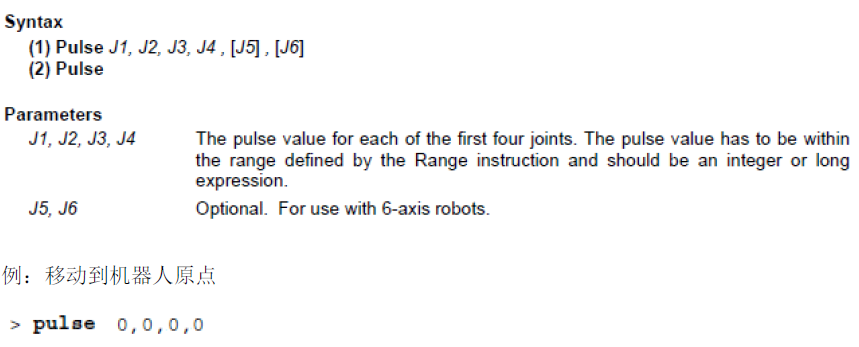
1.PULSE :根据给出每个关节的脉冲数移动或返回当前位置各关节的脉冲值
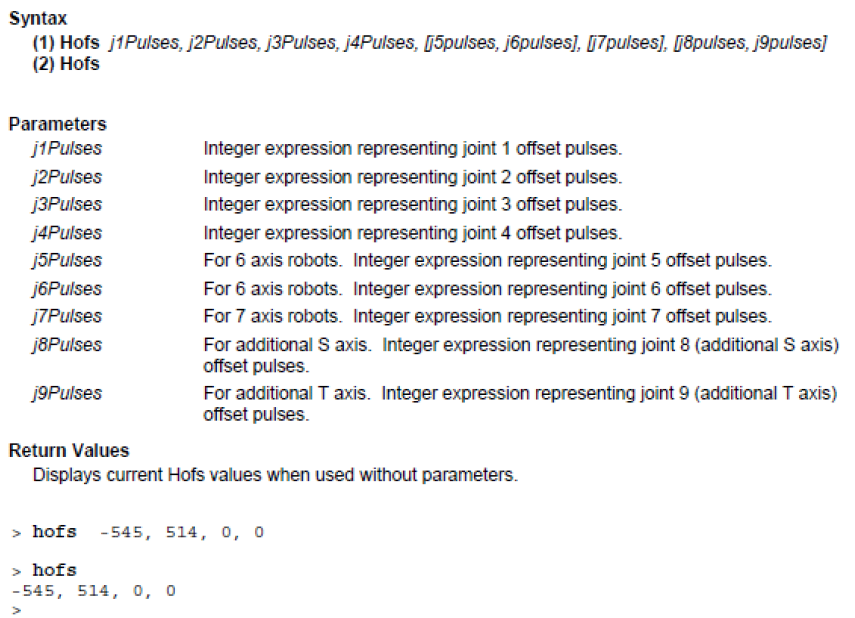
2.HOFS:设置或返回编码器Z相到机械原点的脉冲数
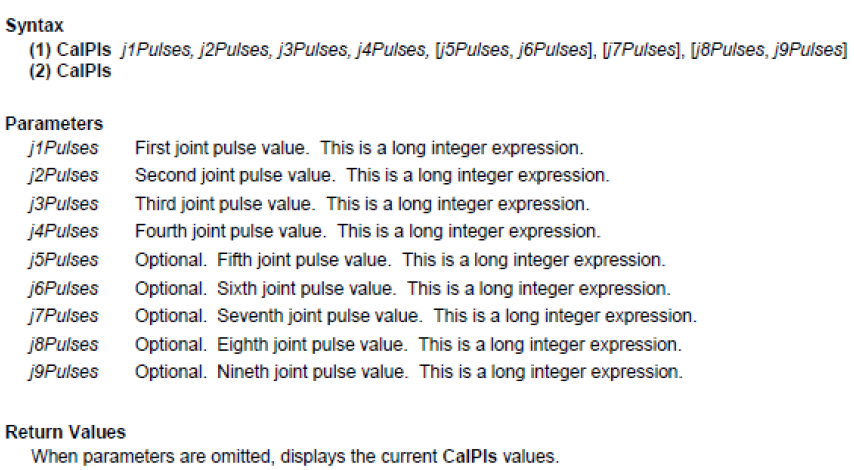
3.CALPLS:校准位置(或原点)的脉冲数设置或显示
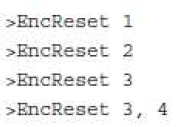
4.ENCRESET:编码器复位
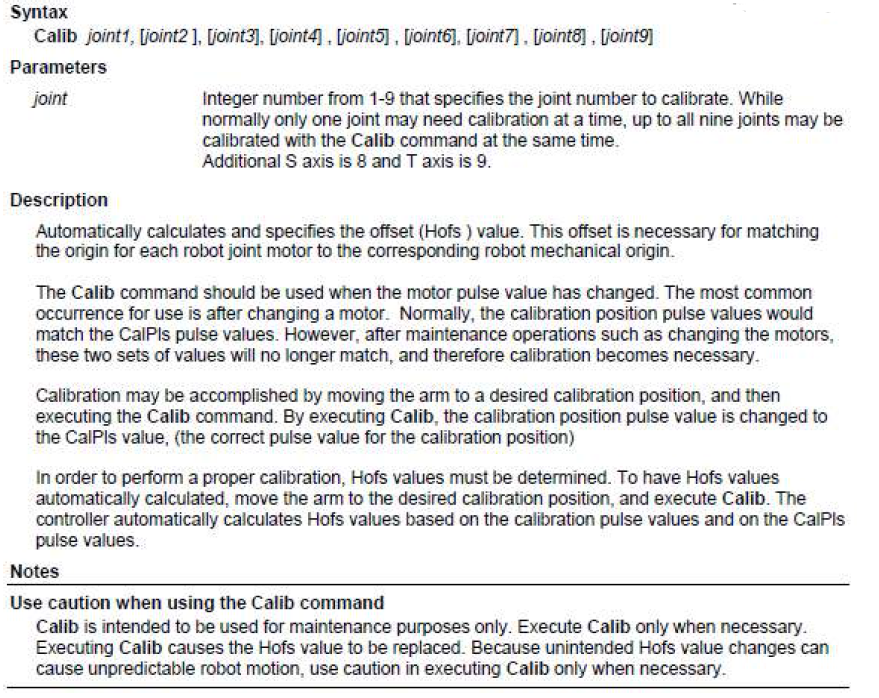
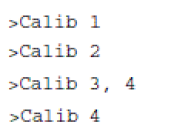
5.CALIB:将Calpls 的脉冲值写入系统
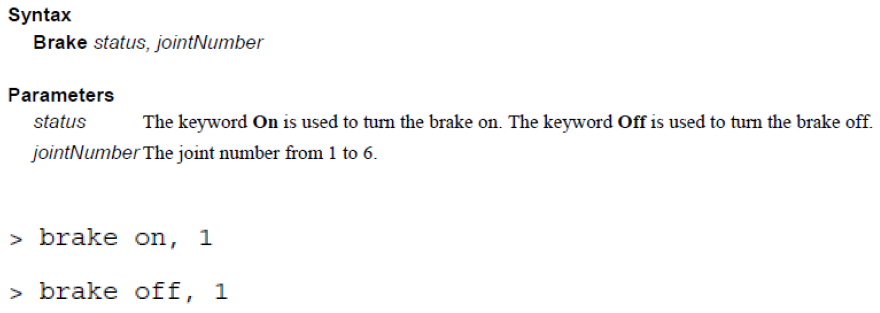
6. BRAKE:刹车单元控制命令;控制电磁刹车单元抱闸或松开
二. 机器人与原点校准方法
1.校准方法:
a. 移动手臂到机械原点或维修前已经确定的位置;
b. EncReset (复位编码器每个轴),在命令窗口输入:Encreset 1- Encreset 6;
c. 重启控制器,“菜单栏”->工具->控制器->重置控制器;
d. 设定原点脉冲,Calpls 0, 0, 0, 0 (在原点位置);
或Calpls Ppls(P1,1),Ppls(P1,2),Ppls(P1,3),Ppls(P1,4) (引用原点变更前已经示教好的P1
点);
e. Calib(校准每个轴):Calib 1
Calib 2
Calib 3,4
Calib 4
2.轴机器人第二关节精确校准(左右手姿势校准):
a. 验证经过校准机器人J2 关节的中心是否重合,方法如下:
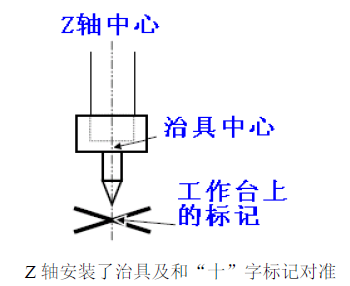
①准备下图治具,安装在滚珠丝杆的末端;该治具的加工精度应足够高,尽量保证
安装后滚珠丝杆、治具顶尖同心;
②在工作台上固定一个“十”字标记(可以用纸打印),在右手姿势移动机器人,让
装在Z 轴上治具的顶尖对准十字的中心,如下图:
③把当前点示教为P1;
④在命令窗口里输入 JUMP P0/L :Z(0) 命令,让机器人切换到左手姿势,把当前
点示教为P2;
⑤点动Z 轴接近工作台上面的“十”字标记,核对这两个位置是否重合;如果重合
校准到此结束,否则继续进行以下操作。
b.补正J2 的原点,在命令窗口输入以下内容:
Hofs Hofs(1), Hofs(2)+(Ppls(P1,2)+Ppls(P2,2))/2, Hofs(3), Hofs(4)
c.移动机器人手臂对准工作台上面的“十”字标记,示校为P3;
d.在命令窗口里输入 JUMP P3/R :Z(0) 命令, 动Z轴接近工作台上面的“十”字标记,核对
这两个位置是否重合;如果重合校准到此结束,否则重复进行1-2步操作。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")


:有无数组?字符串方法,读写文件,序列化,配置文件,异常处理,循环和选择,模块与包,调试手段")
一个完整的测试设备")

Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





