 少有人走的路
少有人走的路勇哥最近跟的一台设备,其视觉定位出现一种奇怪的现象:
定义好工具坐标1后,进行九点标定,然后把视野内的5个像素点位置转为机器人坐标,依次走过去看是否准确。
结果发现只有中间的两个点走过去是比较准确的,而其它的几个点最大偏差有几个毫米!
并且偏差的位置没有规律,有的是向左边偏,有的向右边偏。
操,这又是什么鬼呢?
重新做工具坐标1,做好后,在原地旋转一定角度后,再截原来的点,发现工具1并不准确,有零点几个毫米的误差。
初步判断这样的工具坐标如果用来进行九点标准,误差积累起来肯定会很大。
接下来我们在视野内确定一个点,然后转为机器人坐标,使用左手坐标走过去,再用右手坐标走过去,我们发现两次的结果有很大的偏差,甚至达到几个毫米!!
到此,我们基本上可以确认,因为左右手走位偏差太大,造成工具坐标做不准,也造成标定结果不正确,最终造成走位不准确。
请参考下面的文章进行左右手姿势校准,以解决此问题。
左右手姿势校准
a. 验证经过校准机器人J2 关节的中心是否重合,方法如下:
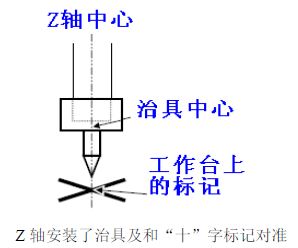
①准备下图治具,安装在滚珠丝杆的末端;该治具的加工精度应足够高,尽量保证
安装后滚珠丝杆、治具顶尖同心;
②在工作台上固定一个“十”字标记(可以用纸打印),在右手姿势移动机器人,让
装在Z 轴上治具的顶尖对准十字的中心,如下图:
③把当前点示教为P1;
④在命令窗口里输入 JUMP P0/L :Z(0) 命令,让机器人切换到左手姿势,把当前
点示教为P2;
⑤点动Z 轴接近工作台上面的“十”字标记,核对这两个位置是否重合;如果重合
校准到此结束,否则继续进行以下操作。
b.补正J2 的原点,在命令窗口输入以下内容:
Hofs Hofs(1), Hofs(2)+(Ppls(P1,2)+Ppls(P2,2))/2, Hofs(3), Hofs(4)
c.移动机器人手臂对准工作台上面的“十”字标记,示校为P3;
d.在命令窗口里输入 JUMP P3/R :Z(0) 命令, 动Z轴接近工作台上面的“十”字标记,核对
这两个位置是否重合;如果重合校准到此结束,否则重复进行1-2步操作。
勇哥注:
为了解决这个问题,epson的技术人员到现场,他们拆掉U轴上的加工件,卸下法兰盘平放好。
当使用左右手都可以把U轴插入法兰盘中时,就校准结束了。
左右手校准完成后,果然工具坐标就能做得比较准确了,从而标定也顺利完成并完成上面的5点验证。




")
")
常用的6种方法")
 封装运动功能")


:功能介绍")

Qt Widgets Designer界面设计器和界面应用")

:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





