接上篇《 用autocad来验证标定原理(1)》
上节把CCDA标定完成了。
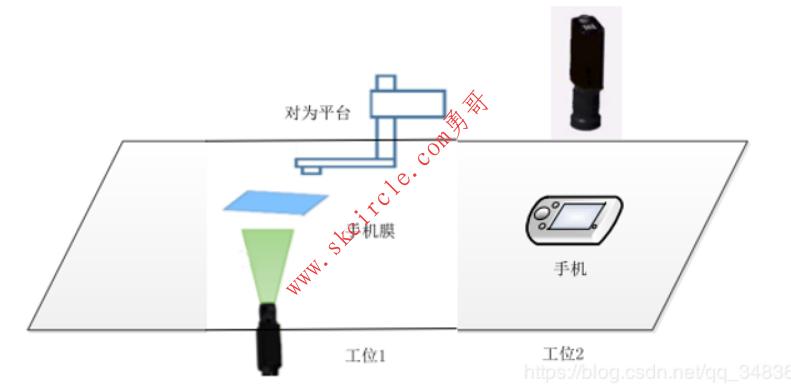
实际的生产过程中,我们常常会碰到这样的情况,机械手从工位一吸着对象到工位二进行贴合,但是工位二我们不方便执行标定,通常的做法是在工位一执行一次标定流程,然后使用两点映射或者四点映射把工位二的相机坐标映射到工位一的相机一中。
所以下面的我们继续做CCDB的标定部分。
我们先把坐标系切换到机器人坐标系。为了画映射板的图形。


我们接下来对两个相机进行相机映射。
制作一个映射板,上面要有4个Mark点,在CAD中勇哥就用矩形上的4个圆表示了。
机械手吸着映射板,在CCDA的视野中拍照,记录当前的机械手位置,这个位置就做为对象每次在CCDA处拍照的模板位置,就是下图中的红圈位置哦。
我们把机械手移x方向平移,到蓝圈所在位置,记录当前机械手位置,这个就是每次到CCDB处的模板位置,也可以叫贴合的基准位置。

现在我们用ucs指令把坐标系切换到CCDA。记录映射板上四个mark点的坐标(四个圆心)

现在我们切换到CCDB的坐标系,记录映射板上的四个mark点坐标。
在这个例子里面,CCDB的坐标系的x轴和机械坐标系的x轴为45度。


勇哥整理了下映射数据如下:
注意两个CCD的四个圆心数据要对应上,勇哥在这里记录的顺序是:左上角,右上角,右下角,左下角。

使用相机映射工具,填入上面的四点坐标。


