 少有人走的路
少有人走的路接上篇 http://www.skcircle.com/?id=1436
上篇贴子谈了怎么样标定后,定位机器人运动到任意一个位置时,相机看到的特征点的位置。
这一篇继续实验一个重要话题: 怎么计算机械人旋转中心到相机视野中心的距离。
机械人旋转中心在tool 0状态就是U轴中心,或者说是法兰盘的中心, 如下图所示。
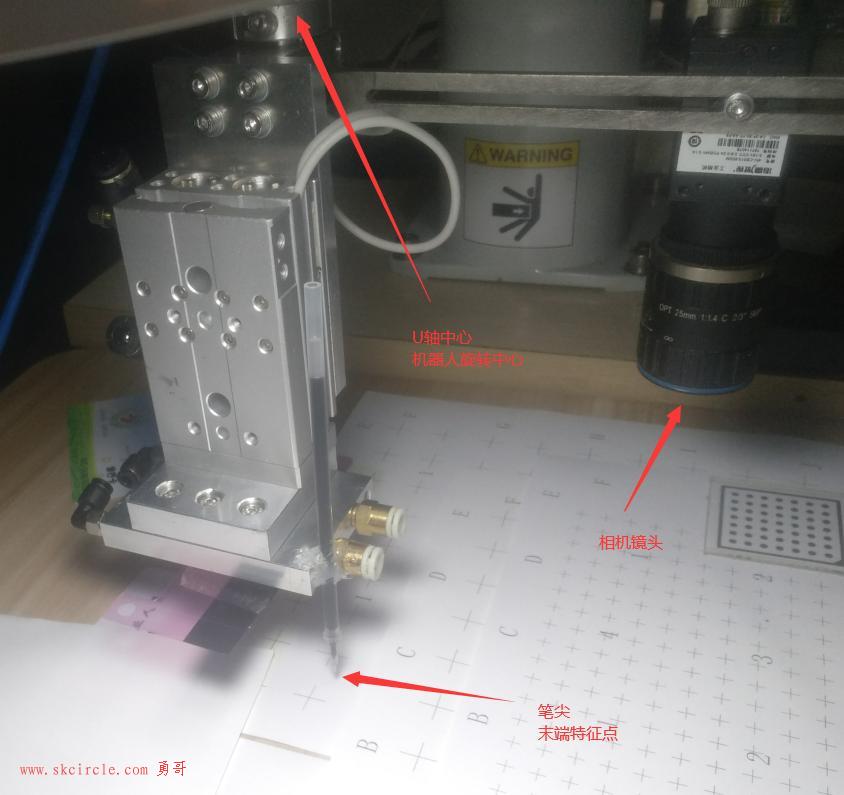
(图1)
另外,有时候我们也会求机器人抓子未端的标定特定点到相机视野中心的距离。
以上两者的求取办法一般有两种:
(1) 做加工件安装在U轴上,戳出点来,然后把相机视野的中心对上去
(2) 用旋转拟合圆的方法来计算
验证方法一:
由于勇哥的U轴上没有安装加工件,那就试试用计算笔尖到相机视野中心的距离吧。
先把笔尖对准一个特征点,记录机械坐标:192.406, 76.351
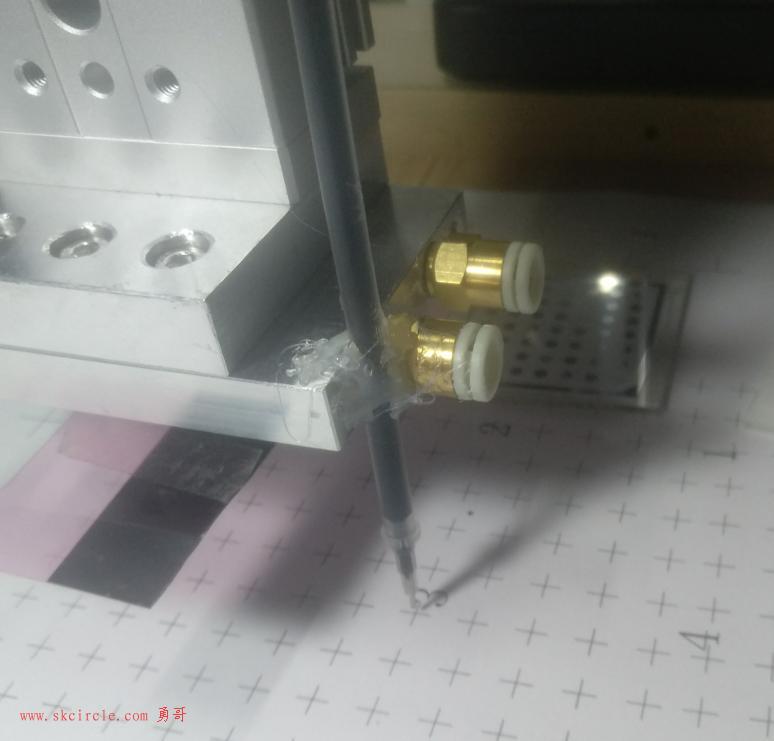
(图2)
然后把移动轴把相机中心对准刚才的特征点。
下图中红色十字就是视野中心。记录下这时的机械坐标:280.613, -15.811
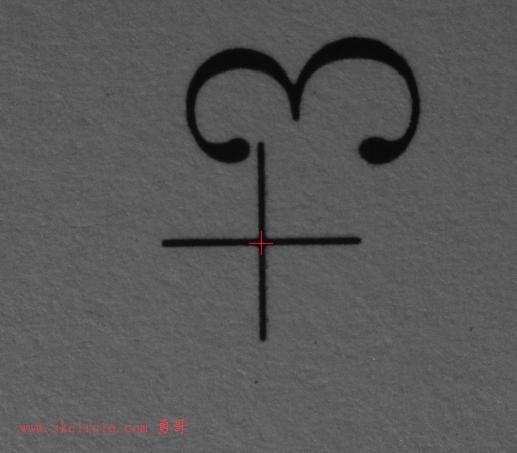
(图3)
cx=192.406-280.613=-88.207
cy=76.351--15.811-=92.162
我们用直尺寸测量一下,其结果如果不是差得特别离谱就是对的。
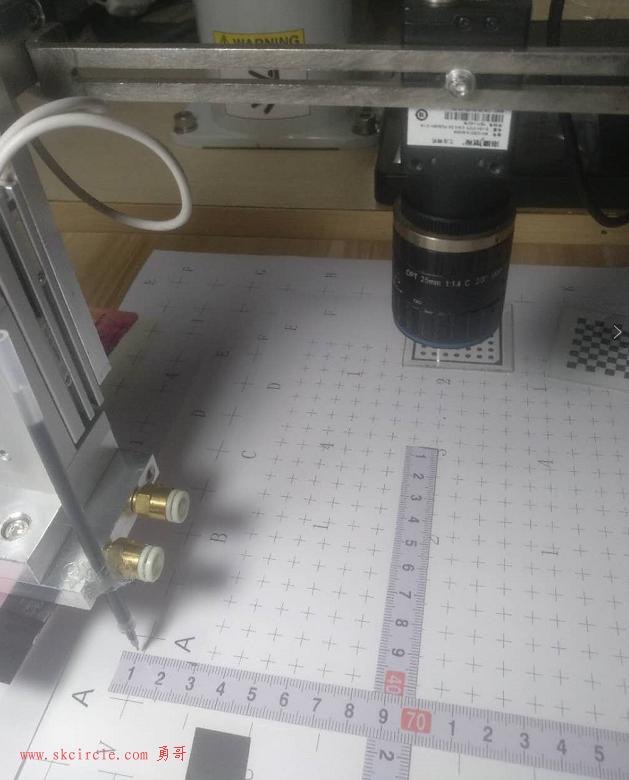
(图4)
验证方法二:
第一种方法由于没有U轴上的加工件,所以没办法求U轴中心到相机视野中心的偏差距离。
但是用第二种方法是可以的。
其方法如下图所示,即在pt1的x,y不变的情况下,旋转出多组角度,角度越大越好,最后再拟合出圆。
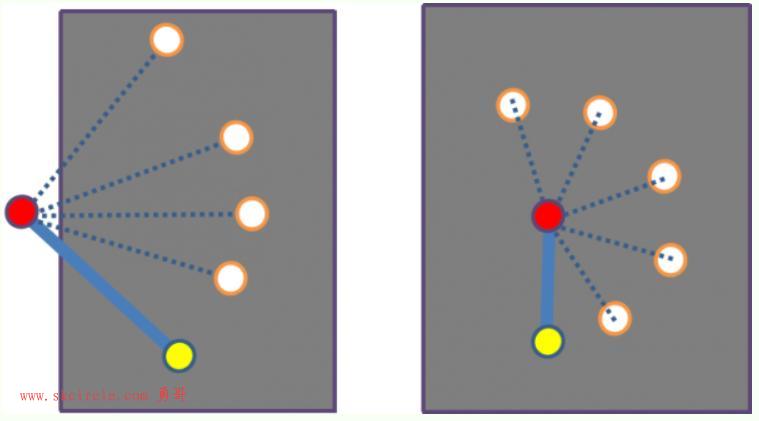
(图5)
未完待续…………
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")


:运行时api的使用,vs环境下的联调")



Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





