 少有人走的路
少有人走的路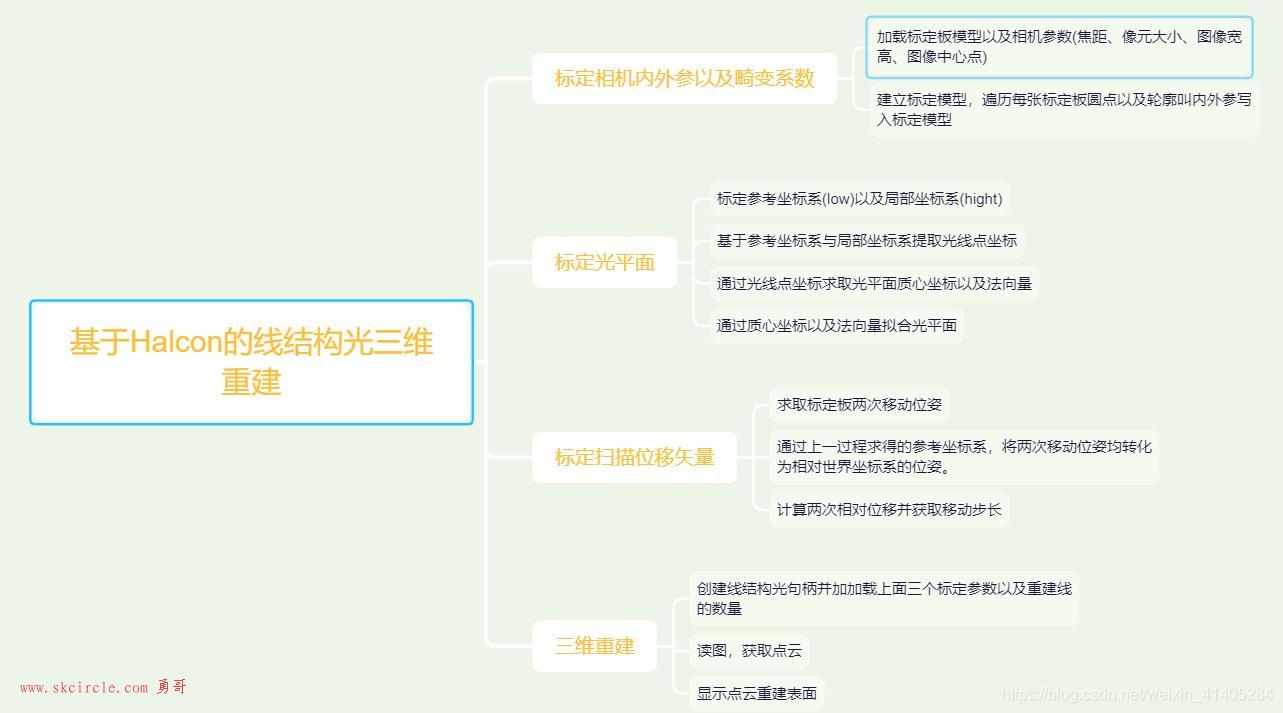
一. 加载标定板模型,标定相机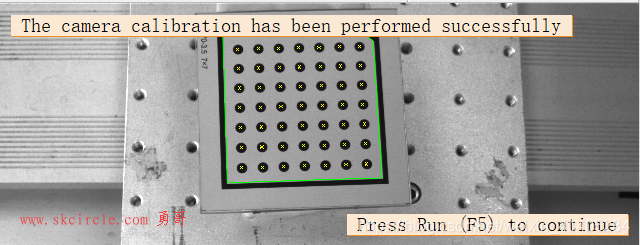
二.拟合光平面
1.参考坐标系并获得标定板位姿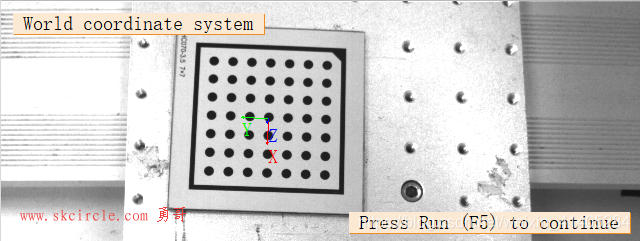
2.局部坐标系并获得位姿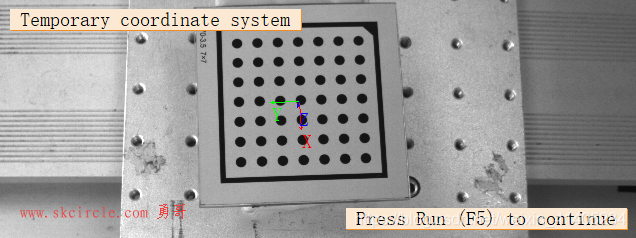
3.获取参考坐标系的光线点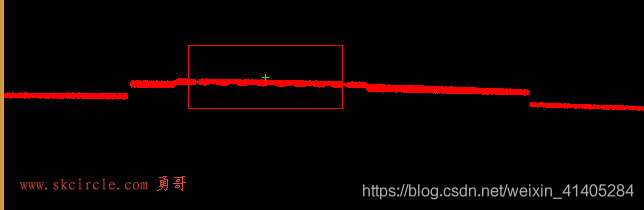
4.获得局部坐标系的光线点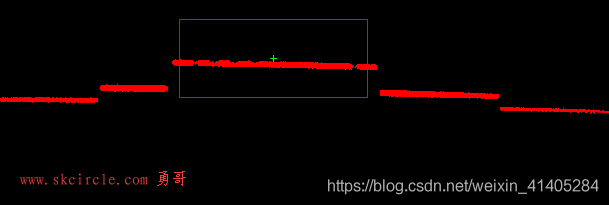
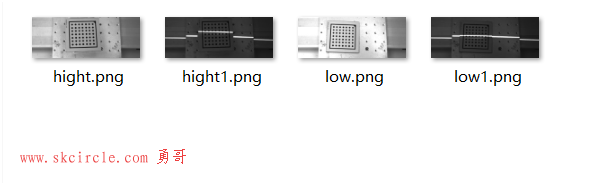
5.判断平面度利用高,低两条光线点拟合光平面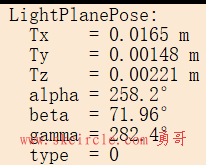
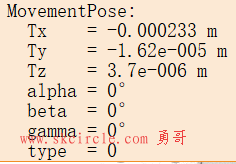
三.标定位移矢量(要求平台移动多余一步)
下图分别是我的起始标定板和移动20个步长的标定板。移动步长由运动控制卡的冒脉冲决定。

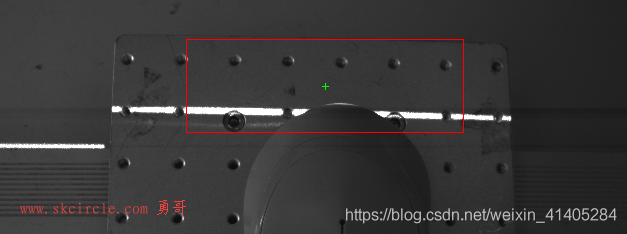
四.三维重建
选择需要重建的区域
获得三维点云图
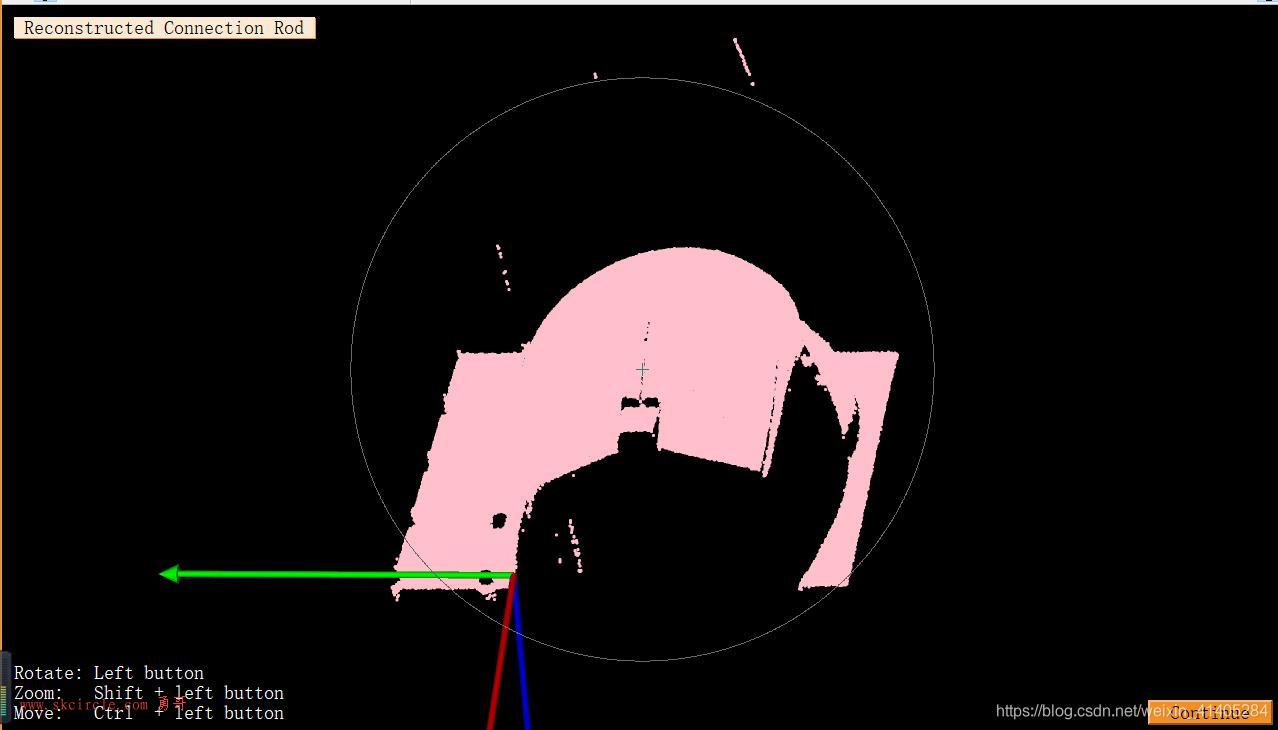
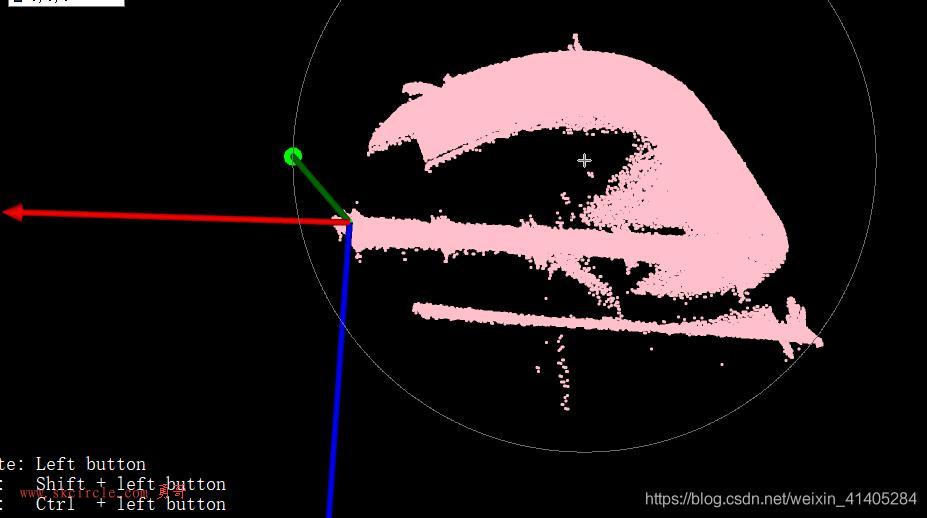
我的三维重建图像有一部分噪点,可以通过调大阈值的方法去噪
五.需要准备的数据
标定图像(推荐十六张以上)

参考坐标系和局部坐标系的标定板
移动平台大于一步,标定位移矢量
重建物体扫描图

转载自:
https://blog.csdn.net/weixin_41405284/article/details/107017805
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")






Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





