 少有人走的路
少有人走的路上一讲无序抓取,我们说到将去噪后的点云,按’z’方向从高到低排序。
这一篇博文将叙述,判别匹配到的面是六面体的哪个面(正面、侧面、反面…)
一.判别六面体
首先将最高点的平面位姿,转换成矩阵,获得zx,zy,zz,通过判别zz的角度,确定当前平面落在那个象限内。
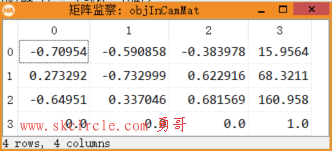
通过zx,zy判定当前Pose的具体位姿,(正面,反面,侧面)
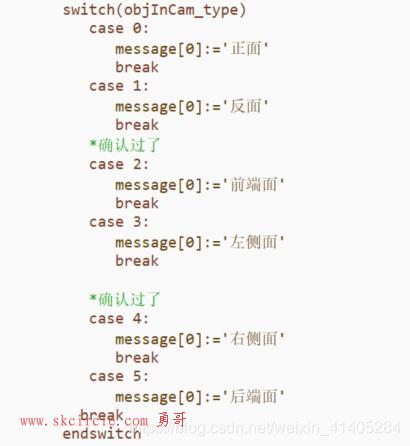
大家可以学习一下这个switch的写法。
框内的物体杂乱无章,可能会出现机器臂根本无法抓取的物料,所以此时要判别一下,当前识别的最高处,点云是否可以抓取。若可以抓取,则继续寻找抓取点.
二.识别抓取点(六面翻转)
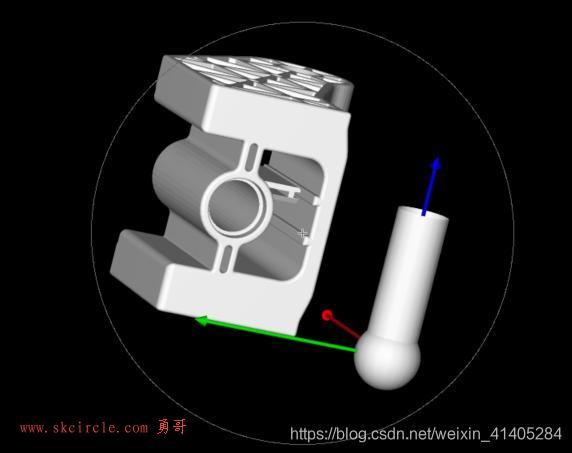
首先获得抓取点的原点位置
图中可以看到,抓取点在(0,0,0,0,0,0,0)原点位置处,可以根据上一个步骤,判别到抓取面之后,对抓取点进行角度和未知的偏移。
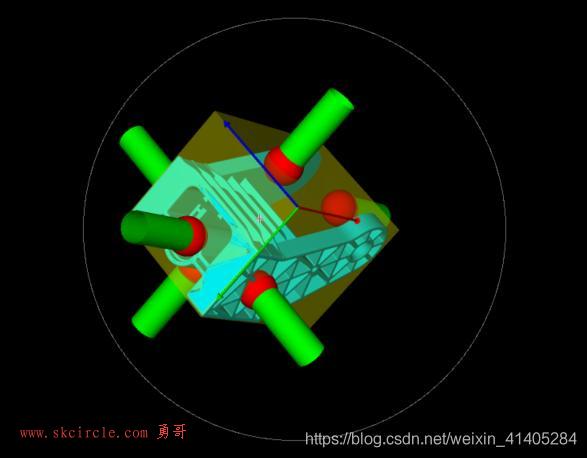
通过六面翻转获得六个面的机器臂抓取点的姿态。
转载自:
https://blog.csdn.net/weixin_41405284/article/details/107297563
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")


:随机对象源,用于生成随机摆放的物料")




Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





