 少有人走的路
少有人走的路定义基于时间的行为和基于事件的行为
定义运动学并创建执行器以移动系统中的运动副后,可以使用仿真序列命令定义基于时间的基本行为和基于事件的基本行为。 使用示例包括:
在特定时间段内激活传输面。
创建条件语句,以在碰撞传感器激活时让速度控制执行器停止。
在刚体接触传感器时更改刚体的质量。
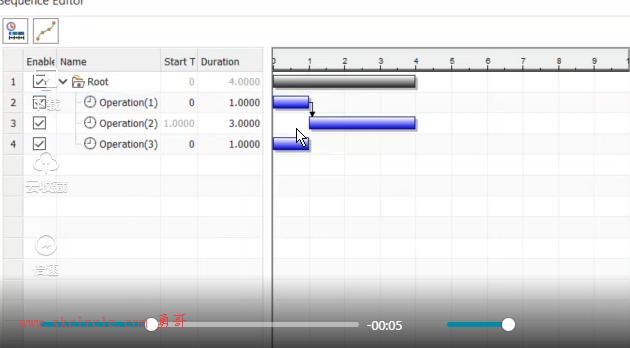
可以像甘特图一样在序列编辑器中管理仿真序列的序列。

要创建序列,可以使用链接器,以使第一个仿真序列必须进行之后才能进行下一个工序。
可以将基于时间的数据导出至文本文件,包括:
步骤号
之前的仿真序列数量
仿真序列开始时间
仿真序列持续时间
仿真序列结束时所经历的总时间
指派给仿真序列的条件对象和参数的名称
工序对话框
类型 | |
类型列表 | 指定要创建的仿真序列的类型。 |
机电对象 | |
选择对象 | 在类型设为仿真序列时显示。 用于设置要由仿真序列控制的对象。 |
| 设置仿真序列,以在运行时更改选定触发体中的标记参数。 |
显示图标 | |
显示图标 | 过滤图形窗口,以仅显示选定机电对象的图标。 |
持续时间 | |
时间 | 在类型设为仿真序列时显示。 设置仿真序列持续时间。 |
运行时参数 | |
运行时参数列表 | 在类型设为仿真序列时可用。 显示可访问的运行时参数或标记表单的列表。 要使参数可供仿真序列访问,在设置列中,选中参数的 注释: 如果选择的机电对象引用刚体,如固定副的连接体,则可以静态指派特定体,或动态指派体以在运行时触发碰撞传感器。 提示: 要设置参数的值,双击其值单元格。 |
编辑参数 | 当选定机电对象且在运行时参数列表中选中除活动以外的任何参数 选中参数 |
| 在标记写入器选为仿真序列时可用。 将参数更改应用于标记实例,但不应用于标记写入器。 |
条件 | |
条件列表 | 在选定条件对象时可用。 显示所有可用条件。条件定义为方程。 仿真序列根据运算符设置启动或暂停。 |
编辑条件参数 | 用于指定在条件列表中所选参数的值。 |
选择对象 | 当类型设为仿真序列时,用于选择条件对象,该对象提供运行时参数以确定仿真序列的启动条件。 当类型设为暂停仿真序列时,用于创建 IF 语句来控制仿真序列何时暂停。 仿真序列根据运算符单元格设置暂停。 对于 AND 或 OR 语句,还可以选择连接体。 |
| 在标记写入器选为仿真序列时可用。 创建条件语句来引用标记实例参数。 |
名称 | |
名称框 | 设置仿真序列的名称。 |
创建基于时间的仿真序列
本例将展示如何创建基于时间的仿真序列,该仿真序列在 2 秒内将圆柱旋转单位旋转 90 度。
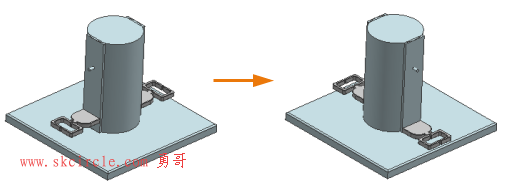
要创建基于时间的仿真序列,该仿真序列将组件绕基本体旋转,必须执行以下操作:
将适当的体类型指派给几何体。
创建基本运动副 - 旋转组件和基本体之间的铰链副。
在旋转组件、滑块和握爪之间创建适当的运动副。
选择主页选项卡→自动化组→仿真序列
 。
。在类型组中,从列表中选择仿真序列。
在机电对象组中,选定选择对象
 。
。在图形窗口或机电导航器中,选择要使用仿真序列控制的执行器。
在本例中,选择了旋转单元速度控制执行器。
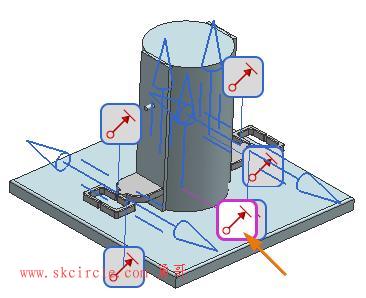
所选执行器的参数显示在运行时参数列表中。
在持续时间组的时间框中,输入希望仿真序列运行的总时间,然后按 Enter 键。
在本例中,使用了持续时间 2 秒。
从运行时参数列表的设置列中,选中速度参数旁边的
 复选框。
复选框。速度的默认值是自动计算,这意味着速度是自动计算的。
选中位置参数旁边的
 复选框以激活它。
复选框以激活它。在同一行中,双击值单元格。
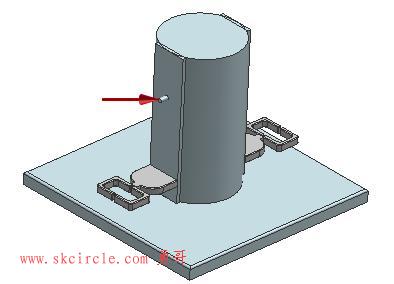
键入执行器的位置参数值,然后按 Enter 键。
在本例中,由于速度控制执行器创建了旋转运动,位置参数是角度。 值 90 用于将圆柱旋转单位旋转 90 度。
在名称组中,键入仿真序列的名称,然后按 Enter 键。
单击确定。
创建基于事件的仿真序列
本例将展示如何为滑动条创建基于事件的仿真序列,该滑动条在与碰撞传感器碰撞后即停止。
要创建此类仿真序列,必须执行以下操作:
创建适当的体类型、运动副和执行器。
创建基于时间的仿真序列,以沿旋转单元的引导曲面移动滑动条。
选择主页选项卡→自动化组→仿真序列
。在类型组中,从列表中选择仿真序列。
在机电对象组中,选定选择对象
。在图形窗口中,选择要使用仿真序列控制的执行器。
在本例中,选择了滑动副速度控制执行器。
所选执行器的参数显示在运行时参数列表中。
从运行时参数列表中,选中速度参数旁边的
复选框。在同一行,双击值单元格,键入一个值,然后按 Enter 键。
在本例中,使用值 0,以使滑块在发生碰撞后停止。
在条件组中,选定选择条件对象
。在资源条上或机电导航器中,选择为滑块创建的碰撞传感器。
IF 条件将创建在条件列表中。
在条件组中,单击 IF 条件前面的值框。
值框变为列表。
从值列表中,选择 True。
在名称 组中,键入仿真序列的名称,然后单击确定。
详细见官方在线文档:
https://docs.sw.siemens.com/zh-CN/doc/209349590/PL20240507114647081.mechatronics/id1109815




")
")
常用的6种方法")
 封装运动功能")
")


")
:随机对象源,用于生成随机摆放的物料")


Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





