 少有人走的路
少有人走的路set_origin_pose
名称
set_origin_pose —转换3D姿势的原点。
签名
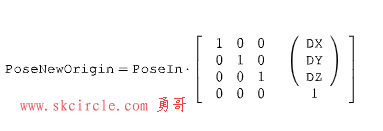
set_origin_pose(::PoseIn,DX,DY,DZ:PoseNewOrigin)
描述
set_origin_pose 用DX, DY和DZ给定的向量转换3D姿势PoseIn的原点,并在PoseNewOrigin中返回结果。注意,相对于姿势本身的局部坐标系执行平移。例如,如果 PoseIn在相机坐标中描述对象的姿态,则 PoseNewOrigin是通过将DX沿其自身的x轴(对于其他轴,依此类推)而不是沿对象的x轴平移对象的坐标系而获得的。相机坐标系。这对应于以下转换链:
因此,set_origin_pose是以下操作员调用序列的快捷方式:
pose_to_hom_mat3d(PoseIn,HomMat3DIn) hom_mat3d_translate_local(HomMat3DIn,DX,DY,DZ,HomMat3DNewOrigin) hom_mat3d_to_pose(HomMat3DNewOrigin,PoseNewOrigin)
通过将标准校准板放置在测量平面上来定义世界坐标系时,此操作员的典型应用。在这种情况下,camera_calibration返回的外部相机参数 对应于位于测量平面上方的坐标系,因为校准板的坐标系位于其表面上并且板具有一定的厚度。要校正姿势,请使用平移矢量(0,0,D)调用set_origin_pose,其中D是校准板的厚度。
参量
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





