 少有人走的路
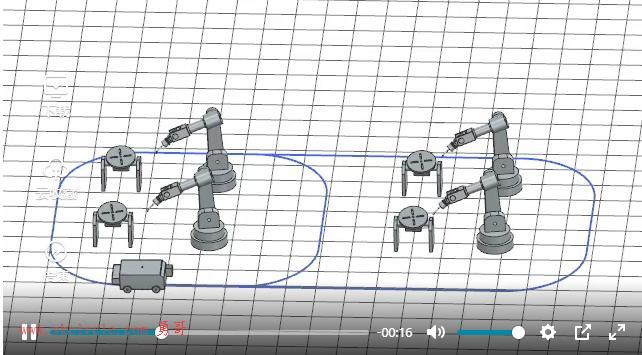
少有人走的路本例将展示如何为自动导引车 (AGV) 概念模型选择其他路线。将使用信号、点在线上副、代理对象以及相关操作。
必须创建装配的基本机电对象,如刚体、碰撞体和执行器。要使用此工作流程,创建以下各项:
曲线 - 用于应用点在线上副。
碰撞体 - 用于确定哪些体与地面碰撞和交互。
速度控制 - 用于为连接到点在线上副的体的运动提供动力。
创建可用于触发曲线选择的信号。
选择主页选项卡→电气组→信号
 。
。在设置组中,从 IO 类型列表中选择输出。
从数据类型列表中,选择布尔型。
从初始值列表中,选择 false。
在名称组的信号名称框中,键入 PathControl,然后单击确定。
关闭将信号名称添加到符号表对话框。
在资源条的机电导航器的信号节点下,右键单击信号并选择添加到察看器。
对于每条连续路径,为每条曲线创建一个代理对象。
选择主页选项卡→机械组→代理对象
 。
。在参数属性组中,从类型列表中选择布尔型。
从值列表中,选择 false。
在几何体单元组中,选取选择几何体对象,然后选择长曲线。
在名称框中,键入 long path,然后单击应用。
重复这些步骤以创建备选曲线的代理对象,将其命名为 short path,然后单击确定。
为连接体和最长路径创建点在线上副。
选择主页选项卡→机械组→基本运动副
 。
。从类型列表中,选择点在线上副。
在图形窗口中,选择要作为连接体的刚体。
在曲线和点组中,选定选择曲线或代理对象。
在机电导航器的基本机电对象节点下,选择 long path 代理对象。
在曲线和点组中,选择指定零位置点。
在图形窗口中,选择引导曲线零位置的点。
在指定矢量高亮显示时,确保矢量方向正确地定向运动副方向。
在设置组中,从运动类型列表中选择动力学。
在名称框中,键入 long path,然后单击应用。
重复这些步骤为备选代理对象创建点在线上副,将其命名为 short path,然后单击确定。
创建一个操作,用于激活具有最长路径的点在线上副。
选择主页选项卡→自动化组→仿真序列
 。
。在机电对象组中,当选择对象高亮显示时,从机电导航器中选择 long path 点在线上副。
在运行时参数组中,选中活动
 复选框。
复选框。在活动列中,将点在线上副设为活动状态。
active = true
在条件组中,使用 PathControl 信号创建一个条件语句,表示希望选择最长路径。
If PathControl value == false
在名称框中,键入 long path_false。
单击应用。
创建一个操作,用于当选定长路径时,停用短路径。
在机电对象组中,当选择对象高亮显示时,从机电导航器中选择 short path 点在线上副。
在运行时参数组中,选中活动
复选框,并将行设为 = false。在条件组中,使用 PathControl 信号创建一个条件语句,表示希望停用 short path 点在线上副。
If PathControl value == false
在名称框中,键入 deactivate short path if false,然后单击应用。
创建一个操作,用于激活具有短路径的点在线上副。
在机电对象组中,当选择对象高亮显示时,从机电导航器中选择 short path 点在线上副。
在运行时参数组中,选中活动
复选框。在运行时参数组中,选择要指派给 short path 点在线上副的运行时参数值。
active = true
在条件组中,使用 PathControl 信号创建一个条件语句,表示希望选择短路径。
If PathControl value == true
在名称框中,键入 short path_true。
单击应用。
创建一个操作,用于当选定短路径时,停用长路径。
在机电对象组中,当选择对象高亮显示时,从机电导航器中选择 long path 点在线上副。
在运行时参数组中,选中活动
复选框,并将行设为 = false。在条件组中,使用 PathControl 信号创建一个条件语句,表示希望停用 long path 点在线上副。
If PathControl value == true
在名称框中,键入 deactivate long path if true。
单击确定。
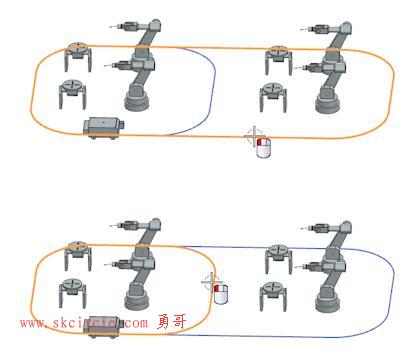
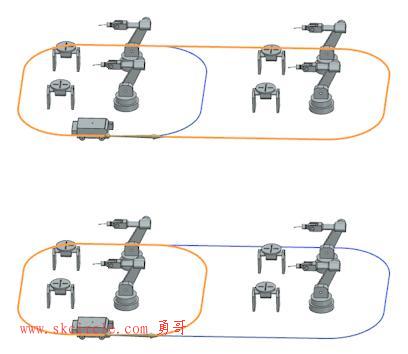
播放仿真,当连接体位于运动副的零位置时,在运行时察看器中更改信号值,以切换路径。
详细见官方在线文档:
https://docs.sw.siemens.com/zh-CN/doc/209349590/PL20240507114647081.mechatronics/id1109815




")
")
常用的6种方法")
 封装运动功能")
:随机对象源,用于生成随机摆放的物料")

:运行时api的使用,vs环境下的联调")


Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





