 少有人走的路
少有人走的路引言:
勇哥注:所谓的3d相机标定并不是指的3d相机的标定,而是指的是3d空间做相机的标定,这个相机仍然是2D相机。 halcon的这套标定方法,同时可以应对测量、手眼标定。 并且由于是在3d空间做标定,因此你在做测量的时候相机和拍摄平面可以不是完全垂直, 或者物料可以任意方向倾斜(当然你的相机的景深要能做得到)。 如果你是做机器人手眼标定,这套标定方法无论是hand to eye,还是eye in hand,都可以搞定。 另外,你是四轴scara机器人还是串联的6轴机器人都可以的。 对于轴动的标定,也是没有问题的。 halcon的标定方法还可以实现相机标定和确定工作平面位姿进行分离。 这意味着你标定完相机后,你的测量平面可以随时改换。 halcon的这套3d相机标定方法不是一般的强,可以搞定现在工业机器视觉的绝大部分标定方面的应用。 至少勇哥还没发现有啥子应用它还做不到的。
透视畸变校准
由于拍照对象高度差造成的3D方向的位姿与世界坐标平面不平行,这种畸变我们可以称为透视畸变。
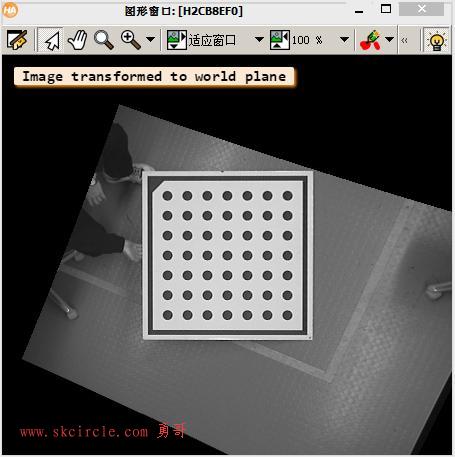
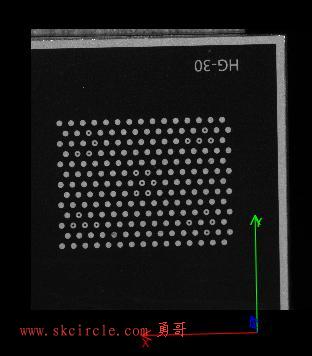
像下面的标定板,勇哥把它故意倾斜了一定的角度,拍出来就是透视畸变的效果。
那么校正之后是什么样子呢?
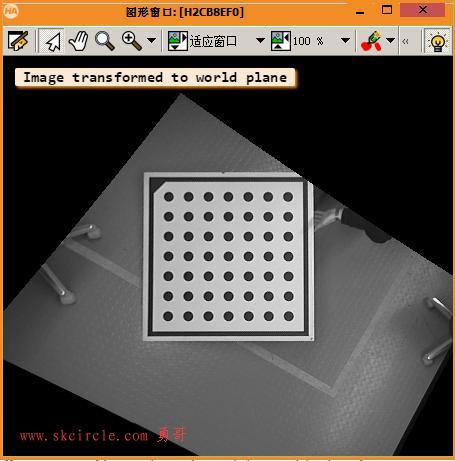
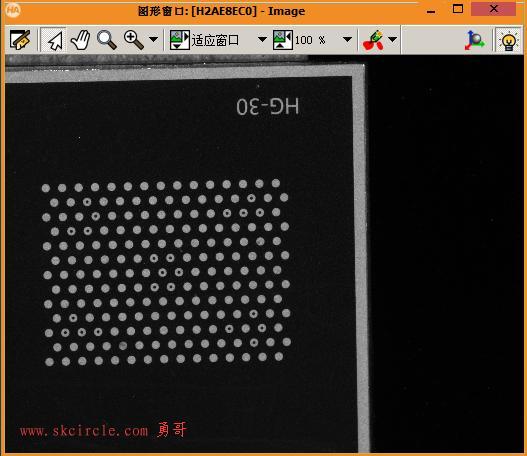
先来一组正常拍照的图像,是有透视畸变的。
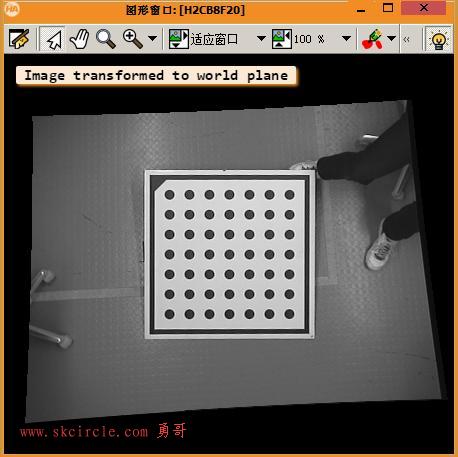
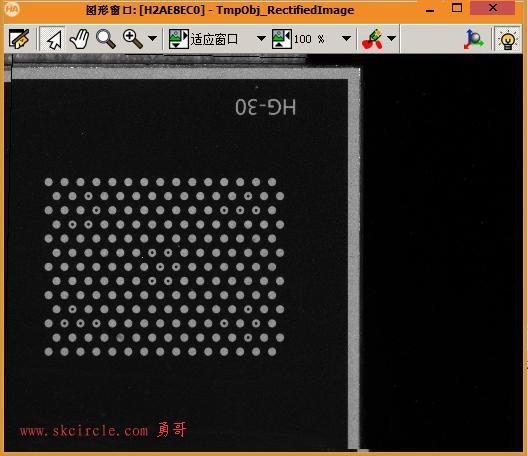
下面对应的进行了透视畸变校正的图像。
![]()
透视畸变校准由算子 gen_image_to_world_plane_map产生纠正映射图,再交由算子map_image计算校准后的图片。
gen_image_to_world_plane_map算子则要求提供相机内参和测量平面的位姿。并且需要指定适当的原点位置。
gen_image_to_world_plane_map算子详细介绍见:
http://www.skcircle.com/?id=1585
请看演示代码:
*如果没标定先进行标定
*calib()
dev_get_window(WindowHandle)
*磁盘载入标定结果
read_calib_data('D:/交流群的问题/skcircle1591_3d相机标定(五)/calib.ccd', CalibDataID)
*进行标定
calibrate_cameras(CalibDataID, Error)
*取得相机内参
get_calib_data (CalibDataID, 'camera', 0, 'params', CameraParameters)
read_image (Image, 'D:/交流群的问题/skcircle1591_3d相机标定(五)/w1.tif')
*求标定板的当前位姿
TmpCtrl_PlateDescription := 'E:/Program Files/MVTec/HALCON-19.11-Progress/calib/calplateHG30.cpd'
TmpCtrl_FindCalObjParNames := 'sigma'
TmpCtrl_FindCalObjParValues := 1
create_calib_data ('calibration_object', 1, 1, CalibHandle)
set_calib_data_cam_param (CalibHandle, 0, [], CameraParameters)
set_calib_data_calib_object (CalibHandle, 0, TmpCtrl_PlateDescription)
find_calib_object (Image, CalibHandle, 0, 0, 0, TmpCtrl_FindCalObjParNames, \
TmpCtrl_FindCalObjParValues)
get_calib_data_observ_points (CalibHandle, 0, 0, 0, TmpCtrl_MarkRows, \
TmpCtrl_MarkColumns, TmpCtrl_Ind, CameraPose)
set_origin_pose (CameraPose, 0.0, 0.0,0, CameraPose)
dev_set_draw('margin')
get_image_size(Image, Width, Height)
gen_rectangle1(Rectangle, 0, 0, Height, Width)
boundary(Rectangle, RegionBorder, 'inner')
dev_display(RegionBorder)
TmpCtrl_RectificationWidth:=65
TmpCtrl_RectificationWidth := TmpCtrl_RectificationWidth / 1000.0
disp_3d_coord_system(WindowHandle, CameraParameters, CameraPose, 0.02)
*旋转坐标轴
pose_to_hom_mat3d(CameraPose, HomMat3D)
hom_mat3d_rotate_local(HomMat3D, rad(180), 'z', HomMat3DRotate)
hom_mat3d_to_pose(HomMat3DRotate, CameraPose)
set_origin_pose(CameraPose, -0.3*TmpCtrl_RectificationWidth,\
-0.4*TmpCtrl_RectificationWidth, 0, PoseNewOrigin)
disp_3d_coord_system(WindowHandle, CameraParameters, PoseNewOrigin, 0.02)
*生成校正图
gen_image_to_world_plane_map (TmpObj_RectificationMap,\
CameraParameters, PoseNewOrigin, 2592, 1944,\
2592, 1944, TmpCtrl_RectificationWidth / 2592, 'bilinear')
*现在,可以使用校正图校正图像
map_image (Image, TmpObj_RectificationMap, TmpObj_RectifiedImage)
get_image_size(TmpObj_RectifiedImage, Width, Height)
stop ()为了表示出透视畸变效果,勇哥把标定板垫起一定的倾斜角度。
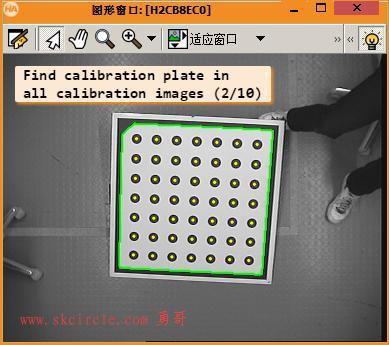
这个图显示的是在没有旋转坐标轴时原点的位置。
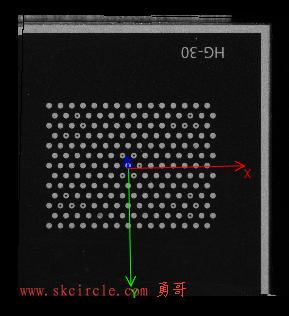
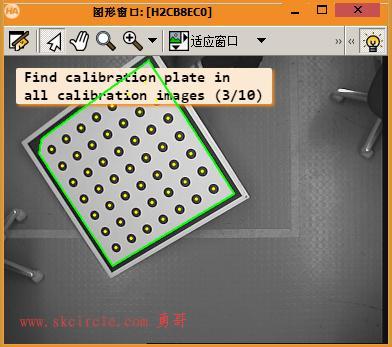
这是旋转坐标轴后原点的位置。
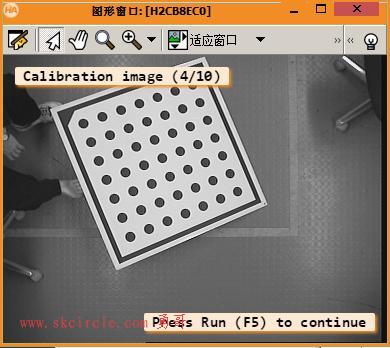
这是读入原始图片。
这是消除透视畸变后的图像。
这个例子里面,可能各位童鞋最不能理解的是下面的这几句:
pose_to_hom_mat3d(CameraPose, HomMat3D) hom_mat3d_rotate_local(HomMat3D, rad(180), 'z', HomMat3DRotate) hom_mat3d_to_pose(HomMat3DRotate, CameraPose) set_origin_pose(CameraPose, -0.3*TmpCtrl_RectificationWidth,\ -0.4*TmpCtrl_RectificationWidth, 0, PoseNewOrigin)
之所以要旋转原点的坐标轴、和移动原点的位置,是为了控制映射图的位置与大小与角度。
这一点通过图文教程不容易看清楚,可以参看勇哥录制的视频。
其它参考资料:
HALCON高级篇:矫正图像
http://www.skcircle.com/?id=1505
常见的hlacon标定流程及其相关算子的解释
http://www.skcircle.com/?id=1572
Halcon 映射校正例程注释(map_image)
http://www.skcircle.com/?id=1281
勇哥的视觉实验:畸变图像的校正
http://www.skcircle.com/?id=1270
halcon相机标定和图像矫正
http://www.skcircle.com/?id=1078
如何测试成像畸变
http://www.skcircle.com/?id=1190
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")



Lungchain支持的Tools")
基本使用:Chains(链)")
创建一个聊天智能体")







