 少有人走的路
少有人走的路- 使用注意事项:
H3U集成轴控(机械手)指令,采用CANLink3.0+620P通信实现。(H3U版本:24303-0000以上,AutoShop需要选择PLC类型为H3U-R)
- 需要手动设置好伺服驱动器波特率,站号;
- 需要手动设置好伺服的停止相关参数;
- 回零方式需要手工设置伺服驱动器的回零方式,并把对应接近开关接到伺服驱动器;
- 该功能会占用H3U的SM、SD特殊软元件;CANlink配置占用D7200,M7200之后的软元件;
- SM400控制指令参数的数据格式,ON:指令数据格式是浮点数(机械单位);OFF:指令数据格式是整数(脉冲单位);设置数据格式后,在轴控(机械手)指令中,位置、速度参数需要按照设定的数据格式给出,轴当前位置、当前速度的显示也是设定的数据格式;SM400默认OFF;可以通过后台Autoshop的设置选项,切换显示的数据格式;
- 如果数据格式设定为浮点数(机械单位),指令使用前,需要设置机械参数比例系数;如果数据格式是整数(脉冲单位),则无需此设置;
- 不建议在SFC中使用轴控(机械手)指令;
- 当伺服出现报警错误时,相应的指令的错误将置位,指令不再执行。
- 特殊寄存器说明
H3U使用的特殊寄存器
使用元件 | 功能说明 | 备注 |
SM400 | 指令参数数据格式切换标志 | 默认OFF。只允许在运行首周期更改。 ON:指令参数是浮点数(机械单位); OFF:指令参数是整数(脉冲单位); |
M7200-M7679 | CANlink配置占用 | |
D7200-D7999 | CANlink配置占用 |
| 轴号 | 轴当前位置显示(浮点数 / 整数) | 轴当前速度显示(浮点数 / 整数) | 轴定位偏差脉冲数设置(整数) | — | 单位机械位移对应的脉冲数(浮点数) | 单位机械速度对应的伺服转速(浮点数) |
轴1 | SD410, 411 | SD412, 413 | SD414 | SD415 | SD416, 417 | SD418, 419 |
轴2 | SD420, 421 | SD422, 423 | SD424 | SD425 | SD426, 427 | SD428, 429 |
轴3 | SD430, 431 | SD432, 433 | SD434 | SD435 | SD436, 437 | SD438, 439 |
轴4 | SD440, 441 | SD442, 443 | SD444 | SD445 | SD446, 447 | SD448, 449 |
轴5 | SD450, 451 | SD452, 453 | SD454 | SD455 | SD456, 457 | SD458, 459 |
轴6 | SD460, 461 | SD462, 463 | SD464 | SD465 | SD466, 467 | SD468, 469 |
轴7 | SD470, 471 | SD472, 473 | SD474 | SD475 | SD476, 477 | SD478, 479 |
轴8 | SD480, 481 | SD482, 483 | SD484 | SD485 | SD486, 487 | SD488, 489 |
… | … | … | … | … | … | |
轴16 | SD560, 561 | SD562, 563 | SD564 | SD565 | SD566, 567 | SD568, 569 |
注:
1.各轴的”当前位置显示寄存器”(以第一轴SD410为例)和”当前速度显示寄存器”(以第一轴SD412为例),数据显示格式需要与SM400保持一致,否则会出现数据显示异常。浮点数格式模式下显示机械位置和机械速度,整数格式模式下显示脉冲数和频率
2.单位机械位移,如1mm,1°,1弧度等;
3.单位机械速度,如mm/s,转/分钟,对应到伺服的单位rpm;
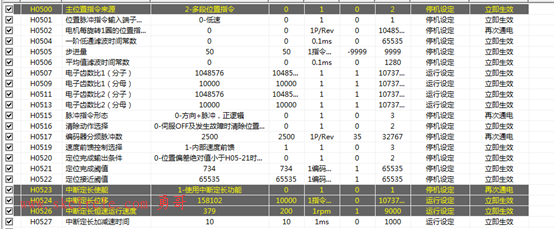
4.各轴设定的定位完成偏移值(以第一轴SD414为例)需要大于伺服H05-21设定的值。否则可能出现伺服定位完成,PLC判定为非完成状态 (PLC判定定位完成的依据为读取到伺服定位完成信号并读取伺服位置在规定的脉冲SD414范围内);
- 使用的轴控(机械手)指令
H3U包含的指令以及使用方式
| 名称 | 描述 |
AXISENAB | 轴使能 |
AXISSTOP | 轴停止定位 |
AXISESTOP | 轴急停 |
AXISDRVA | 轴绝对位置定位 |
AXISZRN | 轴回零 |
AXISJOG | 轴点动,能流有效则一直走,能流断开则停止 |
AXISJOGA | 轴点动,能流有效则一直走,能流断开则停止 |
AXISALMRST | 轴报警复位 |
二、中断定长
1.伺服端中断定长

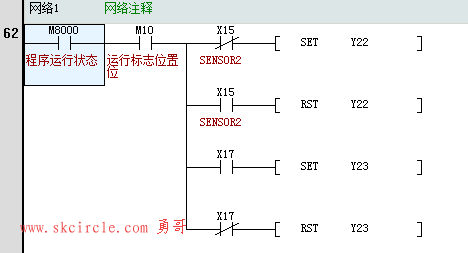
配置为位置模式,然后设置伺服后台为中断定长,PLC的Y22接到伺服的DI9上,设置为下降沿触发中断定长功能。PLC输入引脚接入光电门触发外部中断。
2.PLC端中断定长
PLC版本的中断定长,需要使用DPIT指令。
<
p style=”text-align: center”>
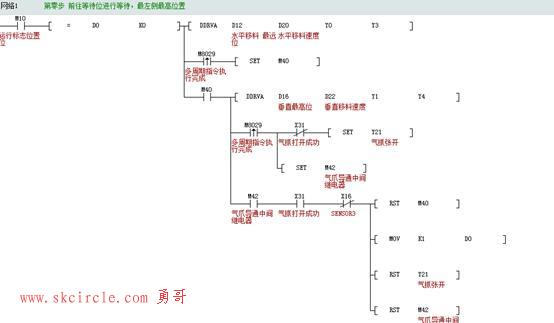
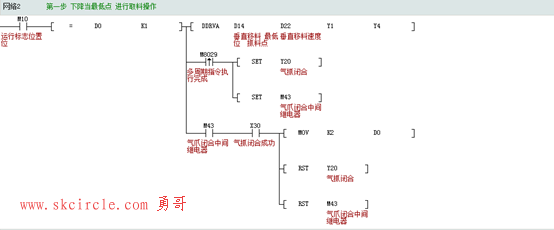
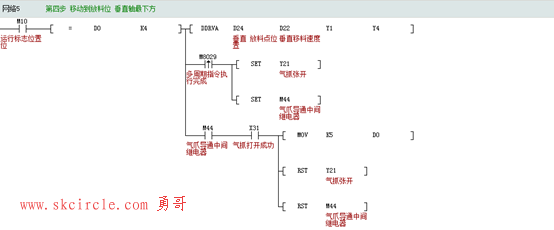
三、取料运动






")
")
常用的6种方法")
 封装运动功能")
:入口函数,运算符,模块与包,py文件 ,基础数据类型,列表")


")

Lungchain支持的Tools")
基本使用:Chains(链)")
创建一个聊天智能体")






