 少有人走的路
少有人走的路勇哥注:
Grip是夹取组件,Gripper则是一个自动化对象,包含了Grip和相关的MU、感应器等。
game4automation的grip系列组件如下图所示:
(一)Grip
grip常见的应用就是拾取、放下MU。
它的图标是:![]()
使用刚体固定或作为子组件
(1)子组件:Grip 可以将 MU 作为子组件附加,这是推荐的方法
(2)Fixed Joints(固定关节):或者,可以使用 Fixed Joints(固定关节)
通过 Physical Joints(固定关节)进行连接。
确定要抓取的 MU
要夹持零件,必须首先通过将传感器分配给“Part To Grip”参数来识别零件。
激活 Grip 后,此传感器识别的 MU 将自动连接。
抓取 MU
开始抓取 MU 的方法
(1)直接抓取:当传感器检测到零件时启动抓取。
(2)Pick based on another sensor(基于另一个传感器拾取):使用另一个传感器的触发器来启动抓取动作。
(3)基于气缸拾取:对于夹持器建模非常有用,此方法根据所选气缸的位置(完全缩回或伸出)启动拾取操作。
(4)基于信号的拾取:可以通过使用布尔值的 PLC 信号控制抓取动作:
单个布尔值:使用一个布尔值在选取 (true) 和放置 (false) 之间切换。
Dual Boolean(双布尔值):使用单独的布尔值进行拾取和放置,以实现更清晰的控制。
使用该属性进行单个布尔控制。OneBitControl
放置 MU
MU 可以通过两种方式放置在其他 MU 上。
要将制造单元 (MU) 放置在其他 MU 或表面上,您只需释放选取的 MU 即可采用物理行为。
加载 MU 意味着将其作为子游戏对象添加到另一个 MU 下。
此设置可确保子 MU 与父 MU 一起移动,就像在实际场景中将 Part 加载到另一个 Part 上一样。
这种关系允许同步移动,从而更容易在虚拟调试设置中模拟复杂的装载和卸载操作。
在此方法中,请确保设置为 false。
但是,请注意,使用此方法的 MU 附件在当前发行版中可能并不完全稳定。
Place Load On MU
作为更可靠的替代方案,我们建议将 MU 设置为 true,以便将 MU 放置到其他 MU 上。
Place Load On MU
Place Load On MU Sensor
当设置为 true 时,必须指定一个额外的传感器 termed ,以标识要放置的目标 MU。

这种设置可确保放置的 MU 成为已识别 MU 的子组件,从而提高稳定性和精度。
可以在 MU 脚本的属性中验证此关系。
调整 MU
Pick Align With Object
Place Align With Object
为了准确对齐可移动单元 (MU),利用特征 和 来确保拾取和放置的零件与指定位置对齐。
通过选择任何游戏对象,MU 的枢轴点将与所选游戏对象的枢轴点匹配,包括中心和所有轴的对齐方式。
这种精确对齐发生在物体连接之前或放置之后,确保无缝集成到所需位置。
性能
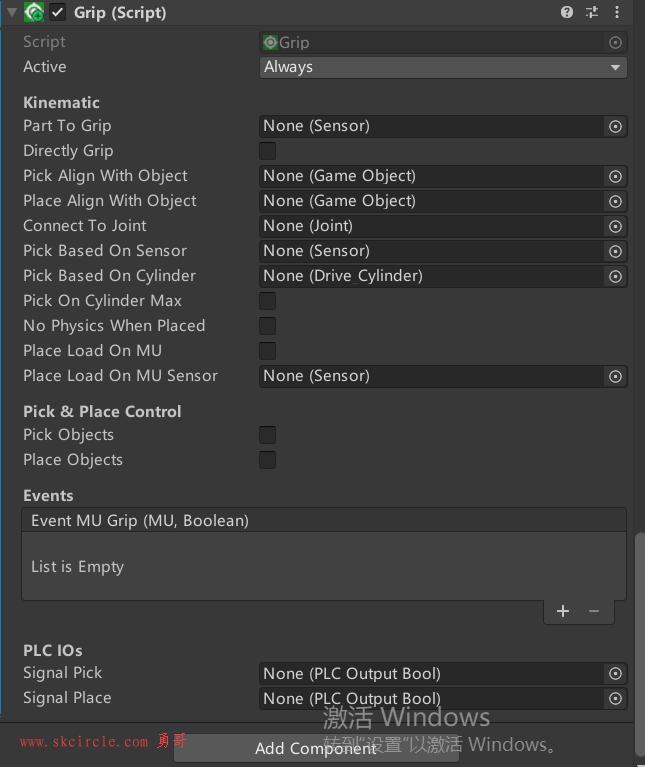
零件到夹点标识要抓取的 MU。这必须分配给传感器。
直接握把如果设置为 ,则当传感器 () 检测到零件时,将直接夹持 MU。truePartToGrip
PickAlignWithObject (拾取对齐对象)如果指定,则在选取 MU 之前将 MU 与此对象对齐(请参阅上文)。
PlaceAlignWithObject 对象如果指定,则在放置 MU 后将 MU 与此对象对齐。
ConnectToJoint 连接Pysical Unity Joint 用于抓取。通常保持为空,仅在应使用关节的特殊情况下使用。
如果设置为 false(默认行为),则 MU 将成为 Grip 游戏对象下的子组件,以确保它由夹持器传输。
如果设置为 true,则需要分配一个 Unity Joint,然后将其连接到 MU。
有关 Unity 关节的更多详细信息,请参阅 Unity 的关节文档。
PickBasedOnSensor (选取基于传感器)当此传感器被占用时开始拣选(可选)。
PickBasedOnCylinder (选取基于气缸)当气缸处于其最大或最小位置时开始拣选(可选)。
PickOnCylinderMax (选取气缸最大值)如果 ,则当气缸达到其最大值时开始拾取。true
NoPhysicsWhenPlaced如果 ,则对象在放置时保持运动学 (无物理特性)。
例如,这将使 MU 不会因物理特性而崩溃。true
PlaceLoadOnMU如果 ,则元件在放置时作为子元件加载到 MU 上。true
PlaceLoadOnMUSensor根据传感器定义放置选取的 MU 时应加载到的 MU。
拾取和放置控制
PickObjects (拾取对象)设置为 以选取传感器识别的 MU。true
PlaceObjects (放置对象)设置为 to 以放置加载的 MU。true
事件
EventMUGrip 文件为 MU 抓取和松开操作触发的 Unity 事件。
它通过 MU 和 for grip,以及 MU 和 ungrip。truefalse
PLC IO 控制器
OneBitControl如果 ,则握点由单个位控制。如果 ,它由两位控制。truefalse
使用 OneBitControl,通过单个信号控制 MU 的抓取和释放:
正侧面 (从 更改为 ) 将夹住 MU。falsetrue
负侧面 (从 更改为 ) 将释放 MU。truefalse
使用 TwoBitControl,使用两个单独的信号来控制过程:
SignalPick 的正侧面 (从 更改为 ) 将选择 MU。falsetrue
SignalPlace 的正侧面将放置 MU.
在此设置中,您需要两个信号来控制来自 PLC 的抓取过程。
信号选择控制拣选的信号。
信号广场控制放置的信号。仅当设置为 时使用。OneBitControlfalse
PickedMU
PickedMU当前选取的 MU 的列表。
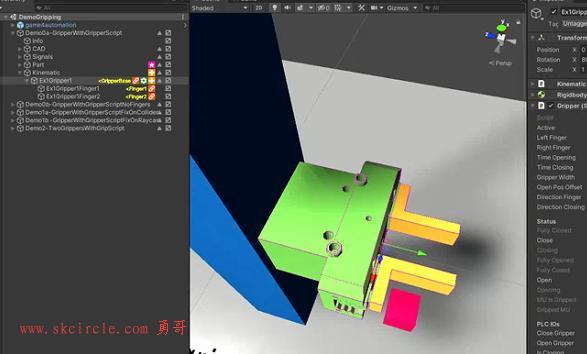
(二)Gripper
Gripper 将手指驱动器、用于检测 MU 的传感器和 Grip 的功能组合在一个组件中。
它对于以舒适的方式建模标准抓手非常有用,就像您在自动化系统中找到的一样。
在仿真启动期间,Gripper 组件将自动创建所需的 Grip 和 Sensor 脚本。
如果使用 Fingers,则会自动创建一个用于检测要抓取的部件的传感器。
传感器还将检测在接触零件之前需要闭合的长度。仅当夹持器完全关闭时,
信号 Is fully closed 才会设置为 true,这意味着没有零件被抓取。
 +
+

性能
左夹子 / 右夹子指定义或不定义夹子是可选的(通过设置属性 LeftFinger、RightFinger)。
如果未定义夹子,则不会看到任何移动。在抓取零件之前,需要经过夹子的闭合时间。
您需要将左夹子组件枢轴点放置在放置用于检测零件的传感器的点上。
Time close / Time opening关闭和打开 Gripper 的时间(以秒为单位)。
当超过关闭时间时,零件将被抓取。部件在打开后直接释放。
Open Pos Offset 夹持器宽度。Gripper 打开时的 Width (宽度) (以毫米为单位)。
Open Pos Offset (打开位置偏移)当前场景视图位置与控制手柄的打开位置之间的偏移(以毫米为单位)。
Direction Finger 方向夹持器局部坐标系中夹子的方向。
Direction Closing 方向闭合夹持器局部坐标系中夹子的闭合方向。
Close Grippper / Open Gripper用于关闭或打开机械手的 PLC 信号
Is Closing / Is Opening在开仓或平仓过程中,信号为 true




")
")
常用的6种方法")
 封装运动功能")


:入口函数,运算符,模块与包,py文件 ,基础数据类型,列表")
")


Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





