 少有人走的路
少有人走的路远心镜头(Telecentric)是为纠正传统镜头视差而设计的一种高端光学镜头,相比一般镜头而言,它在放大倍率、畸变、视差、解析度等方面都具有绝对优势。下面我们来说说远心镜头选择的十大参数。
参数一:远心度(Telecentricity)
远心度(Telecentricity)是指物体的倍率误差。倍率误差越小,远心度越高。远心度有各种不同的用途,在镜头使用前,把握远心度很重要。远心镜头的主光线与镜头的光轴平行,远心度不好,远心镜头的使用效果就不好;远心度可以用下图进行简单的确认。
参数二:分辨率(μm)
光学系能力的尺度,表示黑白格状图案通过镜头观察时,1mm中可以分辨观察到黑白条纹的最多对数。分辨率为两点间在无法识别前,能靠近的最近距离测量值,例如1μm的分辨率代表两点间在无法识别前,能靠近的最近距离为1μm。
参数三:分辨力(Lines/mm)
分辩力指黑白网线图镜头里影像内1mm面积,可识别的黑白两色条纹数。分辨力的单位为线条/mm,例如100线条/mm代表可识别黑白间距1/100mm(10μm)。黑白线条的宽度为1/200mm(5μm)。
参数四:失真(%)
失真为光学轴外的直型物体,呈现曲线时的镜头像差。镜头失真也称为镜头畸变,即光学透镜固有的透视失真的总称,可分为枕形失真和桶形失真,直线朝向中心的失真情况为枕形失真(Pincushion Distortion),向外扩张的失真称为桶形失真(Barrel Distortion)。
参数五:景深
深度为与物体从最佳焦点前后移动时.出现最锐利焦点的最近点与最远点之间的距离。物体侧的深度范围称为景深。同样,照相机侧的范围称为焦点深度。具体的景深的值多少略有不同。景深(Depth of Field)可以用以下的计算式计算出来:
景深 = 2 x Permissible COC x 实效F / 光学倍率2 = 允许误差值 / (NA x 光学倍率)(使用的是0.04mm的Permissible COC)
参数六:焦深
深度为当CCD从最佳焦点前后移动时,出现最锐利焦点的最近点与最远点之间的距离。影像侧的深度范围称为焦深。
参数七:光学倍率
放大倍率(Magnification)指的是通过镜头的调整能够改变拍摄对象原本成像面积的大小。光学倍率就是通过光学镜头变倍的放大倍率。主要点与成像的关系:放大率是指成像大小与物体的比。
参数八:解析度
表示了所能见到了2点的间隔0.61x 使用波长(λ)/ NA=解析度(μ),以上的计算方法理论上可以计算出解析度,但不包括失真。※使用波长为550nm。
参数九:边缘亮度
相对照度是指中央的照度与周边的照度的百分比。
参数十:变倍镜头
焦距可变镜头,倍率,摄像范围等可以简单改变。适合于需要寻找最合适摄影条件(摄影距离,镜头的焦距)以便于操作的场合使用。不产生聚焦位置移动的称为变倍镜头,产生焦距位置移动的称为变焦镜头。
我们了解这些参数之后,再也不会看不懂那些参数了,对于机器视觉项目的镜头选型就更了解了。
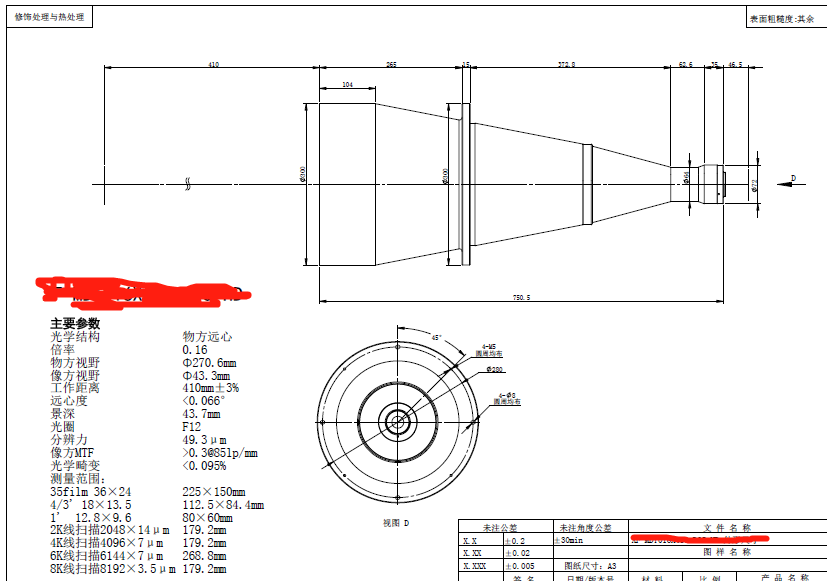
下图是勇哥在一个测量项止用到的远心镜头的参数配置图。
大家可以参考上面的参数对照看一看。




")
")
常用的6种方法")
 封装运动功能")
:运行时api的说明")


:入口函数,运算符,模块与包,py文件 ,基础数据类型,列表")


Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





