 少有人走的路
少有人走的路下面是勇哥实操机器人时接触到的一些零碎知识点,记录下来以备查。
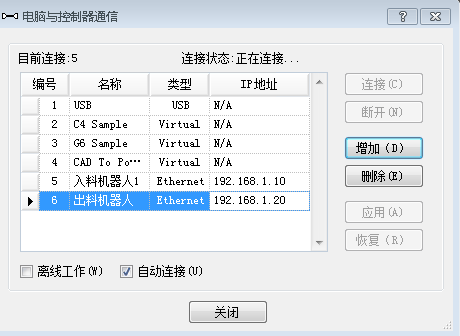
通电联机的方式
新机器人上电后,连接好网线,需要自己设置机器人的连接IP,然后点击连接。
这个面板,不会自动搜索已经连接好网线的机器人。
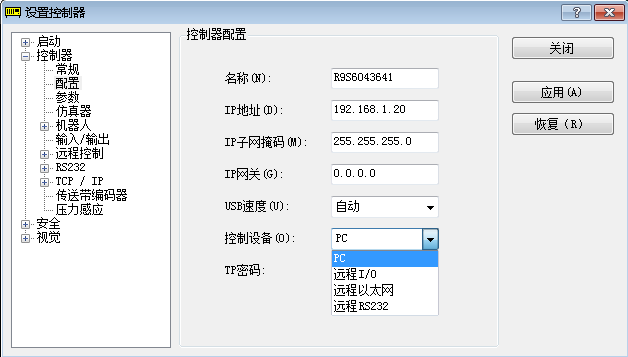
控制机器人的四种方式
在配置参数中的四个选项:
pc:指的是执行机器人内写的程序,可以
远程I/O:指的是用机器人的IO端触发机器人内定的程序
远程以太网:指的是用网络远程指令的方式控制机器人。
远程RS232同上面,只是通讯硬件接口不同。
机器人执行指令
常见的让机器人执行指令的方式有:
pc与机器人程序互动执行
这种方式需要把控制设备方式改为“PC”。
这种方式下,机器人里要写程序,然后PC通过socket与机器人内的程序进行通讯,进行互动。
远程以太网
这种方式需要把控制设备方式改为“远程以太网”。
这种方式下,机器人里面不用写程序。
可以完全由PC发送指令让机器人执行,也可以用plc发送指令。
不管哪种方式,都要在“运行”面板点击“开始”,机器人就进入准备执行指令的状态。
注意如果调试阶段,一定要勾选“低功率”,否则……

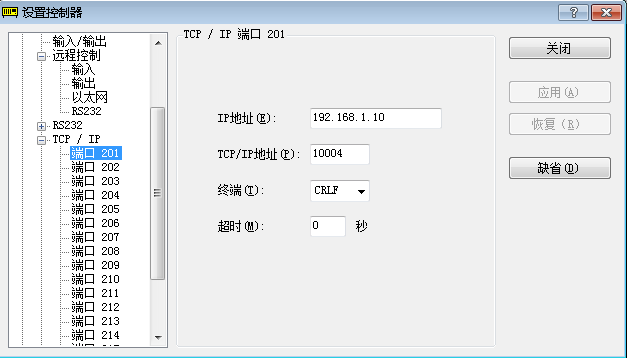
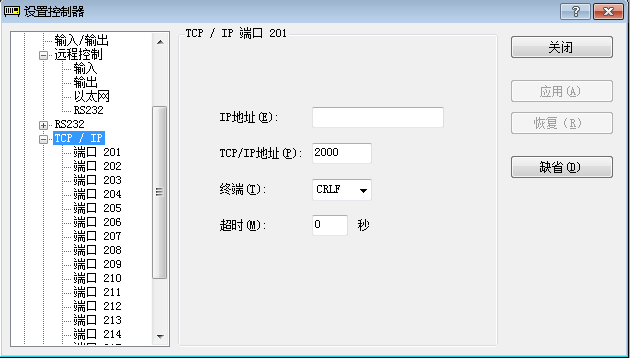
电脑传入socket连接时无响应
执行指令waitNet #201,即等待201端口传入socket连接时无响应。

其原因多半是因为其端口没有被设置为机器人的IP。
如下图,192.168.1.10填写机器人的IP,10004填写的是端口号。CRLF是回车换行(结束符)。
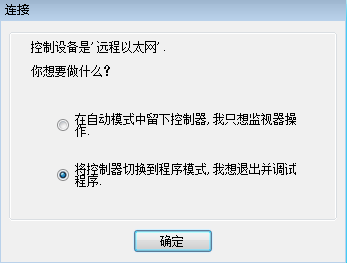
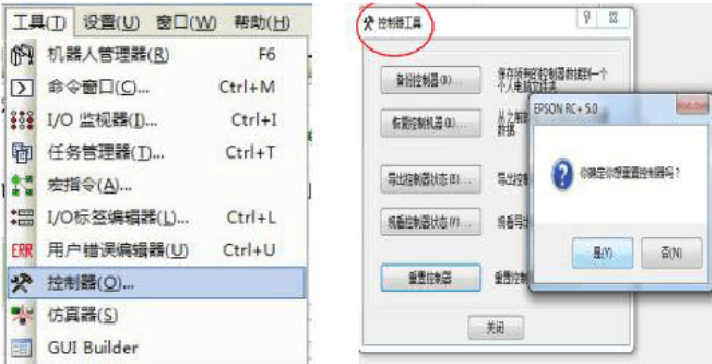
如何软件重启机器人控制器?
方法就是在上面的面板中,改一下参数,然后关闭这个面板,就会提示:正在重启控制器。
查了一下网上的,还可以像下面这样重启控制器。
错误4001,达到动作范围限值
机器人出厂时,经常发现无法步进移动轴,出现类似于下面的提示。
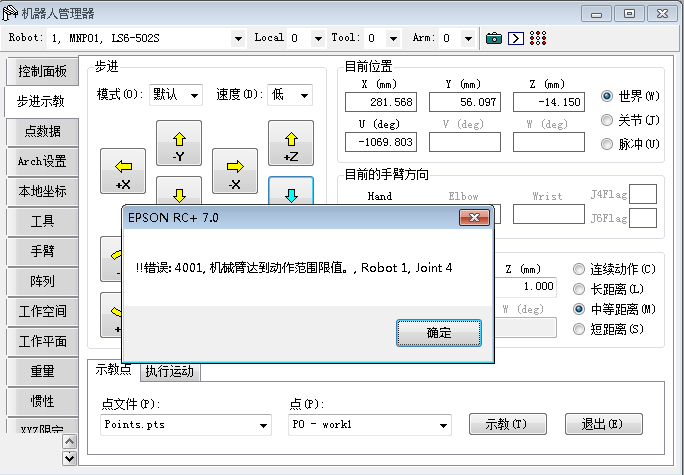
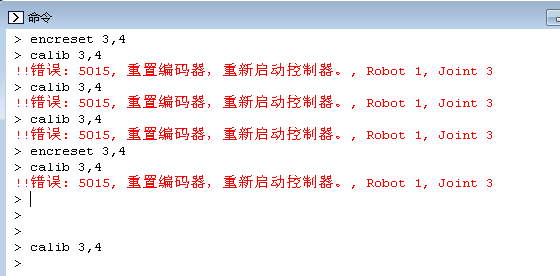
解决方法是把Z轴抬到原点,并旋转到适合的姿势,然后执行下面的指令。
注意下面的红色错误是因为,我们执行完encreset 3,4指令清除编码器信息后,没有把控制器断电重启造成的。
示教点
先运动到指定的位置,然后点击“示教”。
注意Tool坐标系,如果你在标定的时候,一般习惯上使用t0来示教点。而在标定完成后,一般使用t1来示教点。
如果t1下的示教点,放在t0下运动,则会撞机。

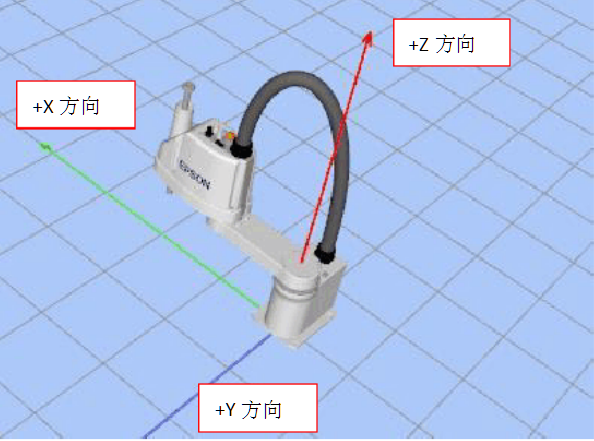
机器人的方向
如下图所示,x,y,z的正方向。
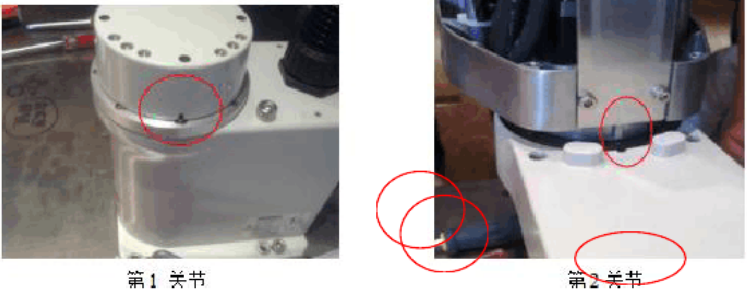
机器人的原点位置
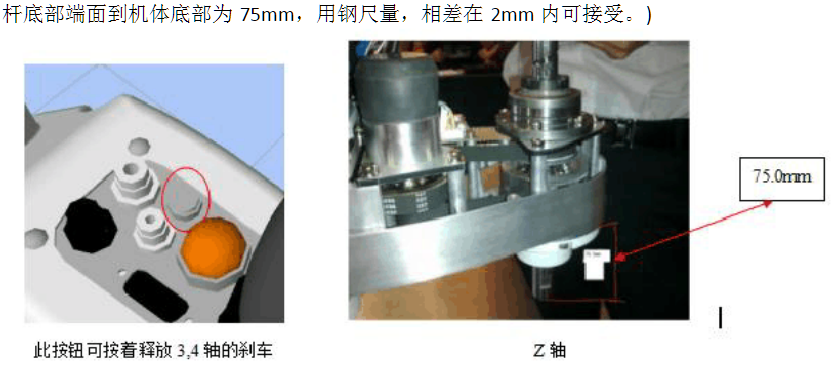
释放轴的刹车
机器人上电(其实就是伺服ON)见下图。
调试时请使用Power Low。
4个轴的刹车可以都释放,这时候可以方便搬动机器人确定点位。
要注意的是,如果机器人不通电源的情况下,你搬动机器人是有阻尼的,机器人越大这种阻尼越大。所以这种情况下你要机器人上电后再松开轴的刹车才可以搬得动机器人。
另外,机器人顶部那个3,4轴的刹车,你在机器人不上电源的时候按了是没有用的。

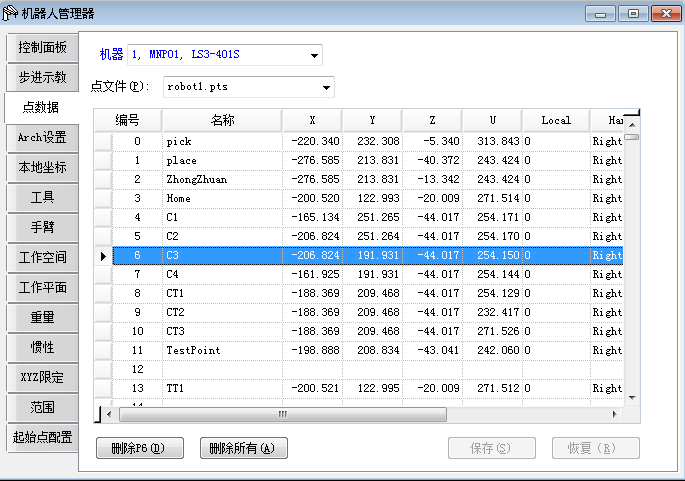
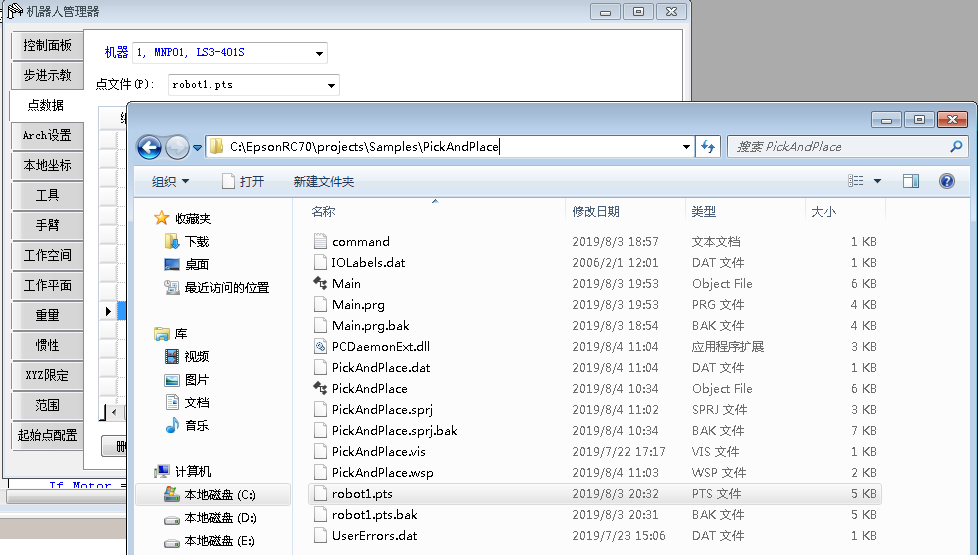
机器人的点位文件怎么复制到另一个机器人
通过复制粘贴的方式有点哀,点数据并没有提供另存,或者导入的功能。
可以在项目文件目录中找到对应的原点信息,在这个目录还包括机器人的源码信息。
程序断点后怎么继续跑起来
单步调试后,想继续自动跑起来,可以按F7键,如下图。

按了f7键后,会弹出一个窗口问你是否要重新开始,选择是。
注意这个提示比较误导人,它说的重新开始并不是指重头开始运行,而是从当前位置继续。
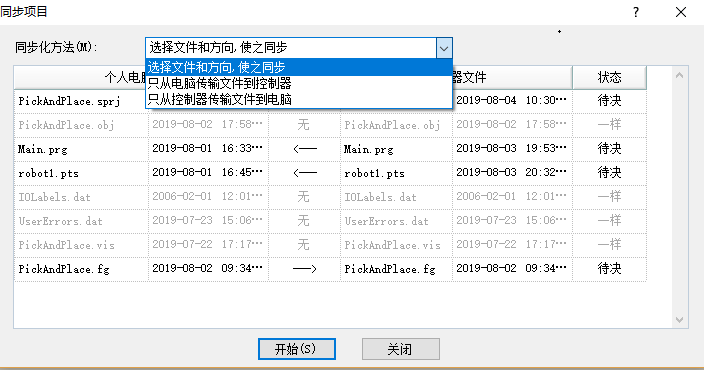
本地程序与控制器程序的冲突
如下图所示,其原因是在本地改变了机器人的程序。
如果自己没有在本地改过程序,那么保险的做法是“只从控制器传输文件到电脑”。
2019/9/10 勇哥追加:
为什么单步可以走到的点,用点位走却动不了且机器人报警?
这个问题让勇哥困惑了一会,原因是这个点的手势和单步执行时不同。机器人换手换不过来因此报警。
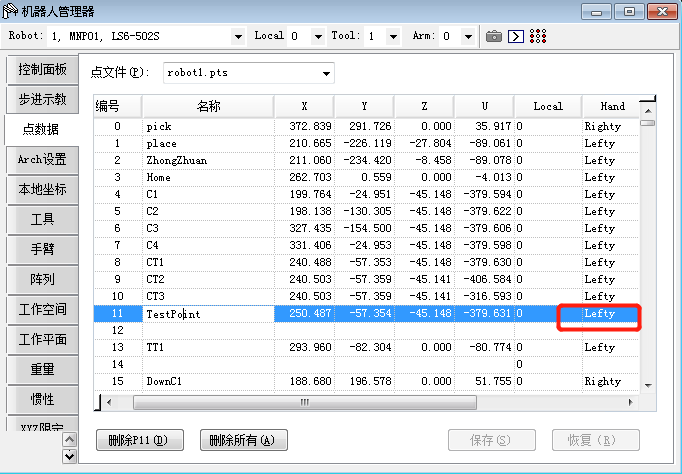
在创建点位时,会有一个默认手,所以各位在创建点位时一定要注意一下你是要左手还是右手。
另外,原来正确的点,如果换手来跑是有可能撞机的!各位一定要当心。
如果你不清楚怎么分辨左手还是右手,请站在机器人接线的屁股后面,用你的胳膊来类比,2轴如果跟你左手胳膊一个姿势就是左手,否则就是右手。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")


:与C#不同点,鸭子类型,多线程,多进程编程,访问控制,事件委托实现,lambda表达式,常用内置库,为啥说python简单易用?")


Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





