 少有人走的路
少有人走的路Epson Robot G3/6原点校正方法
原 点 校 正
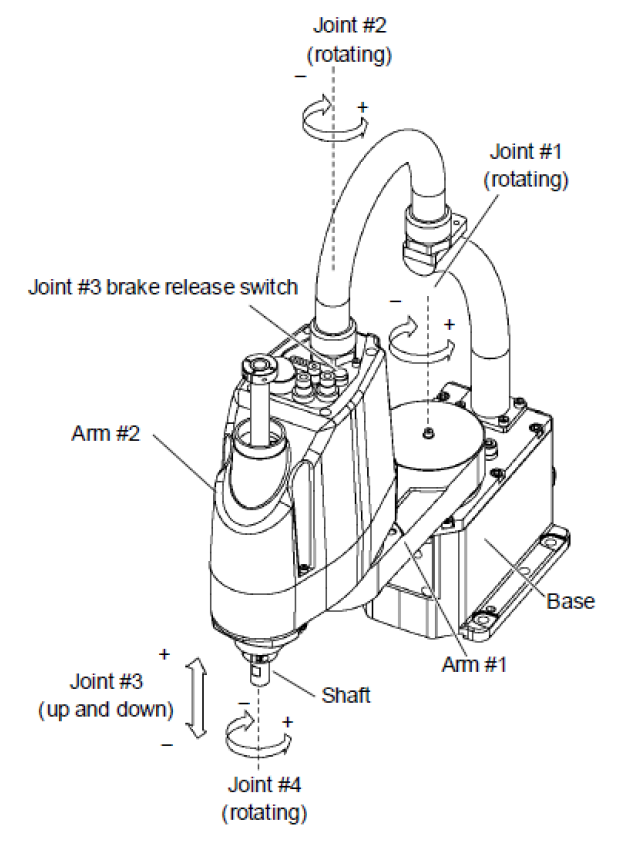
下图为Epson Robot 文档里对于Robot 原点的说明。
对于新到的设备,应该先检查,再确定是否需要校正。如果原点位置正确,不需要校正;如
果不正确,则需要校正。
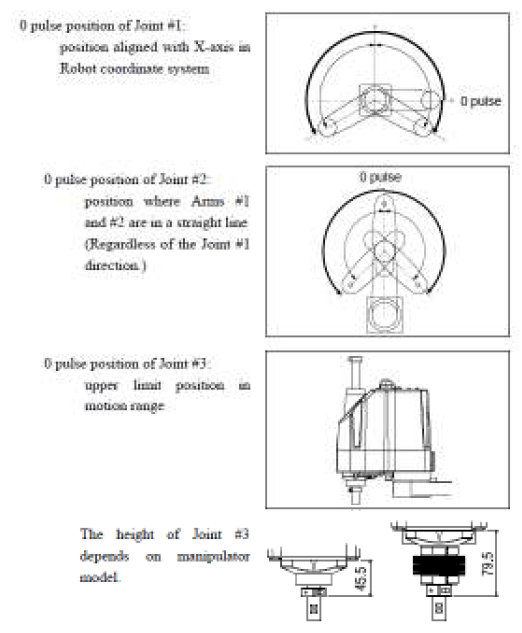
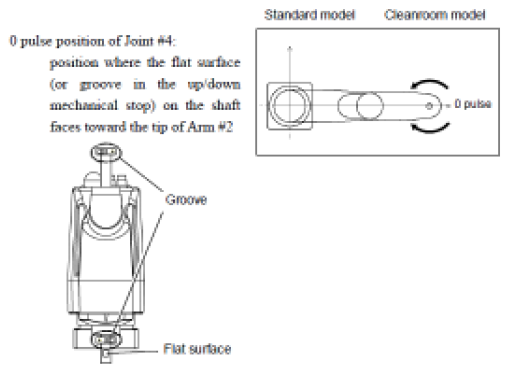
G3 原点。
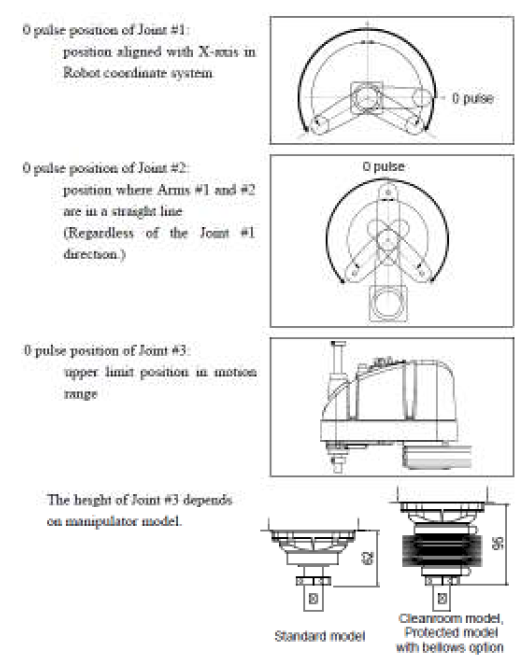
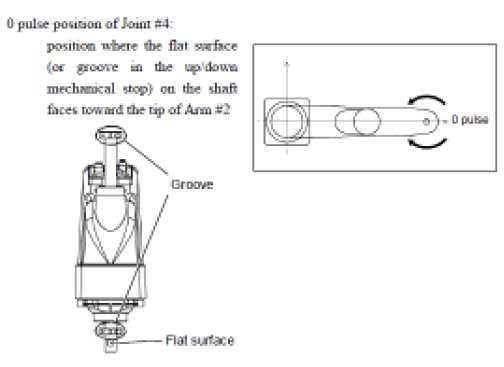
G6原点。
校正的方法有两种:
1、使用Calibration Wizard ( Menu [Setup]-[Controller]-[Robot]-[Calibration] )。
这种方法在Epson Robot文档里有详细说明,每执行一步都有相应提示,
在此不再赘述。
2、不使用Calibration Wizard 。以下对这种方法详细阐述。
准备工作
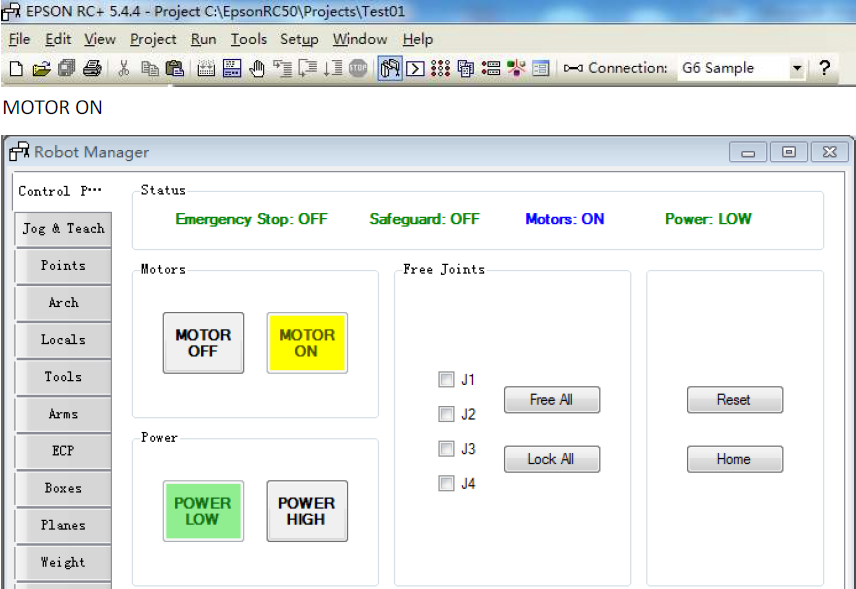
设备上电
打开EPSON RC+ 软件
在EPSON RC+ 软件中连接需要校正的Robot
打开Menu [Robot Manager]
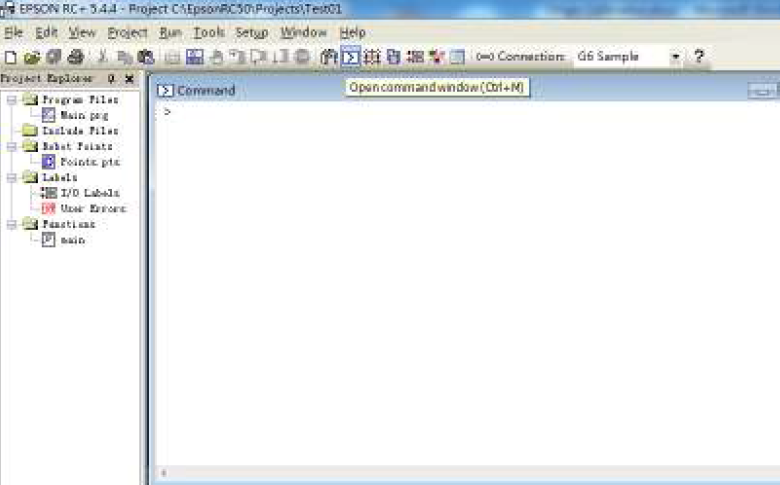
打开Menu [Command Window]
检查方法及步骤
[Command Window]中输入
Pulse 0,0,0,0 <回车>
待robot 运动完成后检查是否移动到了正确的位置。如果正确,不需要校正;如果不正确,
则需要校正,执行一下步骤。(位置参考原点图)
校正方法及步骤
可以四个轴同时校正,也可以单独校正,但注意不能单独校正第四轴,如果需要校正第四轴,
应该和第三轴一起同时校正。
以下为四个轴同时校正的方法及步骤,单独校正某个轴的方法类推。
[Command Window]中输入
SFree<回车>
手动移动Robot 各轴至正确的原点位置(位置参考原点图)
[Command Window]中输入
Motor Off<回车>
EncReset 1,2,3,4<回车>
重启Robot,Menu [Tool]-[Controller]-[Reset Controller],等待robot 重启完成后
[Command Window]中输入
CalPls 0,0,0,0<回车>
Calib 1,2,3,4<回车>
至此原点校正完成,接下来检查
[Command Window]中输入
Motor On<回车>
SFree<回车>
手动移动Robot 各轴至其他位置
[Command Window]中输入
SLock<回车>
Pulse 0,0,0,0<回车>
待robot 运动完成后检查是否回到刚刚的正确位置。
Joint #2 的精确校正
如果原点校正完后第二轴精度达不到要求,需要对第二轴精确校正。同样先检查,再确定是
否需要校正。
[Command Window]中输入
Motor On<回车>
SFree<回车>
手动移动robot 至如下位置(使用右臂),第一轴臂角度大致为45°,第二轴两臂之间夹角
大致为90°,第三轴收回至最高处。
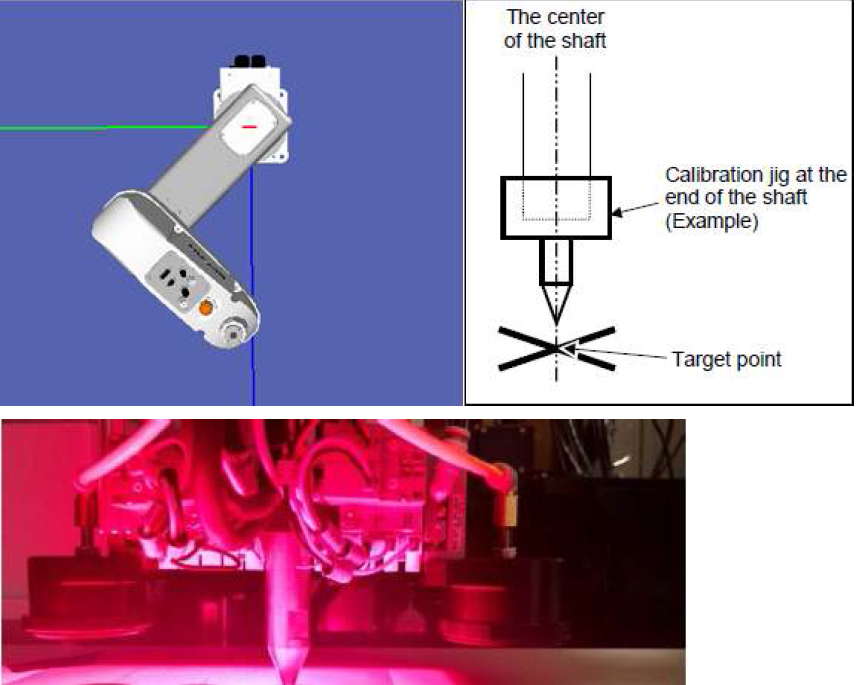
在第三轴的正下方的传送带上贴一张纸
在第三轴的正下方的螺丝孔处垂直安装上“Screw Calibration Pointer”,向下移动使针尖尽量
贴近纸,在纸上画下针尖指向的位置。
[Command Window]中输入
SLock<回车>
Here P0<回车>
Jump P0/L<回车>
Robot 会使用左臂,待robot 运动完成后检查针尖是否指向刚刚做记号的位置。如果是,则
不需要校正;如果不是,则需要校正,执行以下操作。
[Command Window]中输入
SFree<回车>
手动移动robot 的第一轴臂及第二轴臂,使针尖指向刚刚做记号的位置。
[Command Window]中输入
SLock<回车>
Here P1<回车>
Hofs Hofs (1), Hofs (2) + (Ppls(P0,2) + Ppls(P1,2)) /2, Hofs(3), Hofs(4) <回车>
至此Joint#2 的精确校正完成,接下来检查
[Command Window]中输入
Here P0<回车>
Jump P0/R<回车>
Jump P0/L<回车>
以上两个Jump 命令每一个命令执行完后,针尖都应指向标记的位置。
至此完成Robot 的原点校正和Joint#2 的精确校正。
注:
执行命令时报错可能的原因:
1. 执行某个运动的命令比如Jump,Pulse 等报错
可能由于robot 处于Motor Off 状态,需要执行Motor On;
可能由于某一个轴或多个轴处于free 状态,需要执行SLock;
可能与执行命令相关的位置名称未定义,需要先定义位置名称;
可能由于某个轴超限,需要检查。
2. 执行EncReset 1,2,3,4 时报错
可能由于robot 处于Motor On 状态,需要执行Motor Off。
3. 语法错误
命令拼写错误,需要改正。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")




Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





