 少有人走的路
少有人走的路机器人的坐标系,你知道多少 ?真的会使用坐标系吗?下面我来带你来剖析机器人的坐标系吧!(以ABB机器人举例说明)
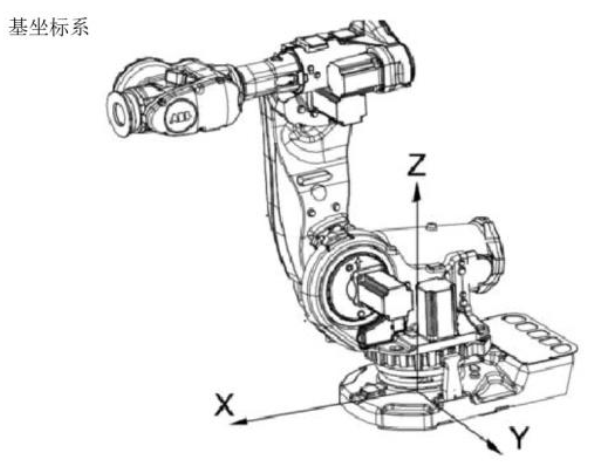
1. 基坐标系
基坐标系是以机器人安装基座为基准、用来描述机器人本体运动的直角坐标系。
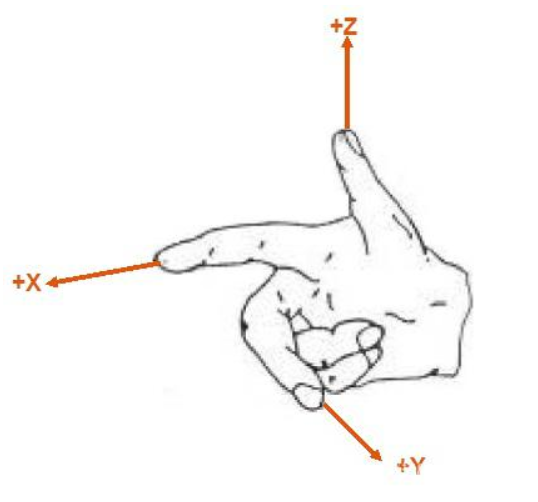
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
坐标系遵守右手准则:
2. 大地坐标系
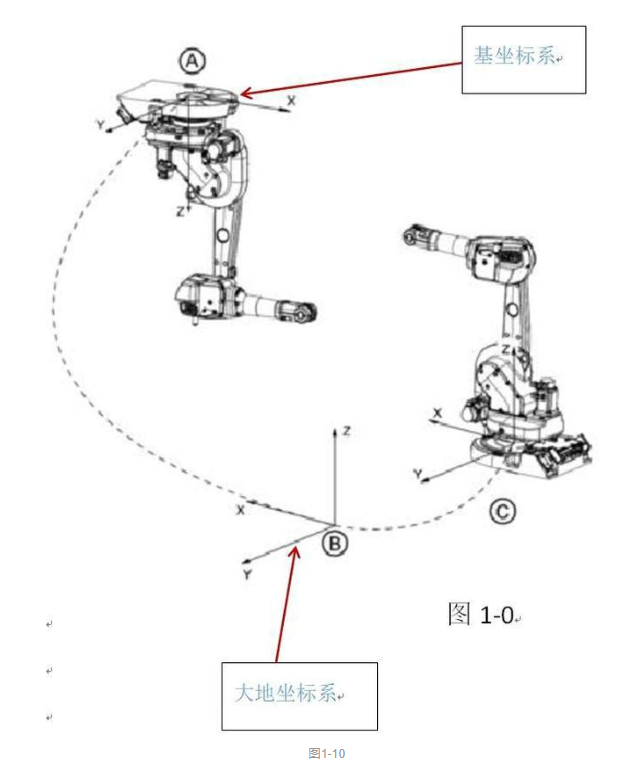
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合:
(1)机器人倒装。如图1-0,倒装机器人的基坐标与大地坐标Z轴的方向是相反,机器人可以倒过来,但是大地却不可以倒过来。
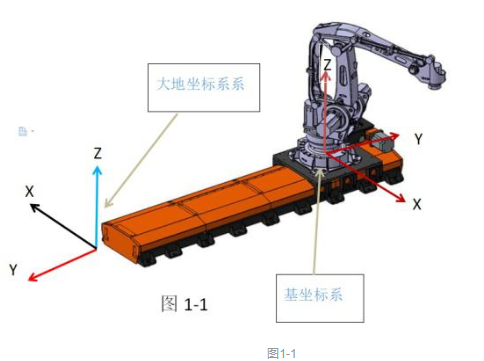
(2)带外部轴的机器人。如图1-1,大地坐标系固定好位置,而基坐标系却可以随着机器人整体的移动而移动。
3. 工具坐标系
工具坐标系:是以工具中心点作为零点,机器人的轨迹参照工具中心点,不再是机器人手腕中心点Tool0(如图1-2)了,而是新的工具中心点(如图1-3)。

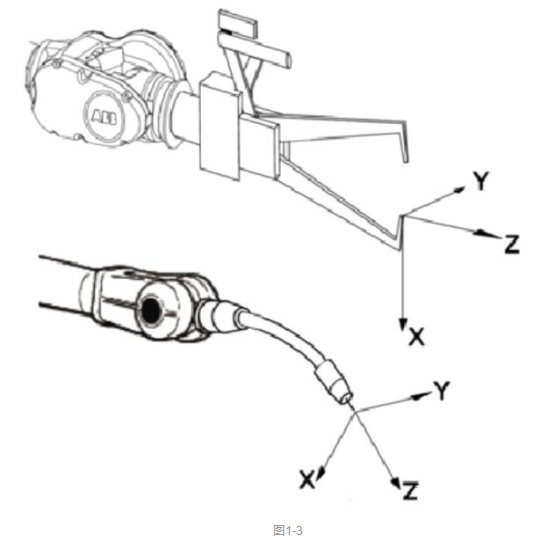
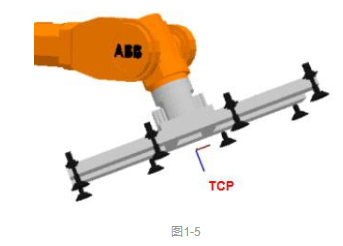
例如:焊接的时候,我们所使用的工具是焊枪,所以可把工具坐标移植为焊枪的顶点。而用吸盘吸工件时使用的是吸盘,所以我们可以把工具坐标移植为吸盘的表面(如图1-5)。
4. 工件坐标系
工件坐标系:工件坐标系是以工件为基准的直角坐标系,可用来描述TCP运动的坐标系。
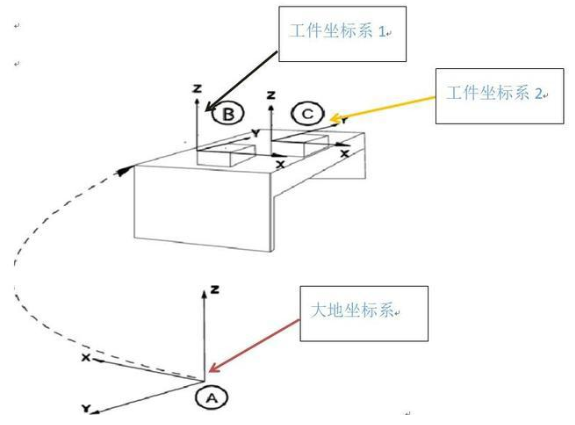
充分利用工件坐标系能让我们编程达到事半功倍的效果。
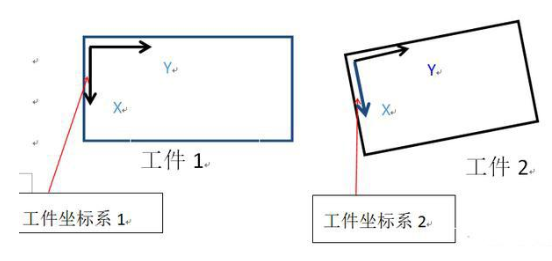
例如:机器人加工工件1,轨迹编程已经编好,另外有工件2,轨迹不需要重复编程只要把工件坐标系1改为工件坐标系2即可。
Epson机器人中的“本地坐标”是什么鬼? 有没有人告诉勇哥?
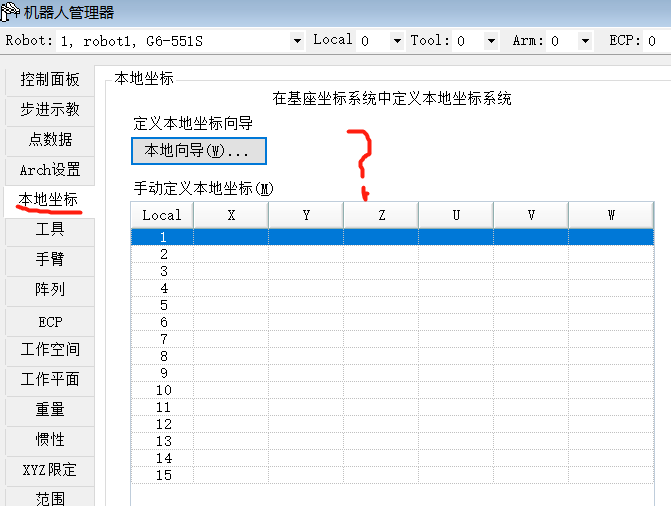
2019/11/21注,关宇本地坐标见下面的贴子:
Epson机器人Local坐标的使用 http://www.skcircle.com/?id=746
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")

")





Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





