 少有人走的路
少有人走的路Local坐标的使用
爱普生机器人local坐标系使用,主要用于拍照MARK点坐标,根据MARK点的本地坐标,自动计算所有工作点在机器人坐标系下的坐标点,引导机器人定位、装配等工艺。
Local坐标又叫本地坐标,或者工作坐标。适用于工作点较多而且点相互之间有明确的几何关系。
例如PCB(一般有特定的参考点、有相对于参考点的工作点位置)或者数控加工零件。
Local指令
Local可以指定一个Local坐标,常用的方式有:
(1)通过原点, xy方式确定(需要3点)
Local 1,p1,p2,p3
(2)通过2个参考点确定
Local 1,(p1:p11),(p2:p12)
p1和p2为本地坐标系的点,为参考点相对本地坐标的几何位置关系。p11和p12为机械手坐标系的点,应用中一般为实际 测量点
应用例子
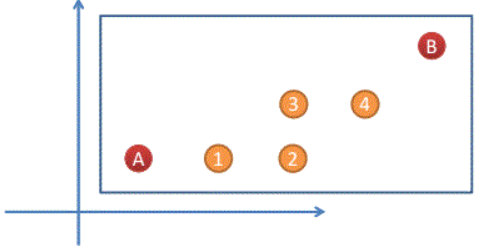
如下图,PCB板上有6个点,AB为定位参考点,1-4为焊接点。
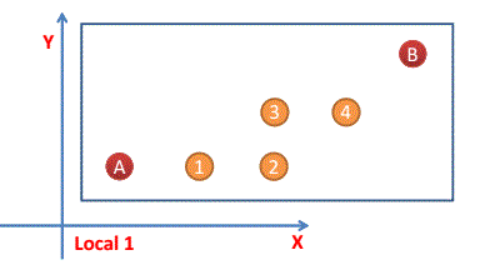
首先,需要建立PCB基准的坐标系L1,记录下所有点在L1下的坐标(坐标数值可以从图纸获得,也可以叫CAD坐标)
PL_A=XY(100,100,0,0)/1 '用/1表示Local 1下的坐标
PL_B=XY(500,300,0,0)/1
PL_1=XY(200,100,0,0)/1
PL_2=XY(300,100,0,0)/1
PL_3=XY(300,200,0,0)/1
PL_4=XY(400,200,0,0)/1
获取参考点实际位置
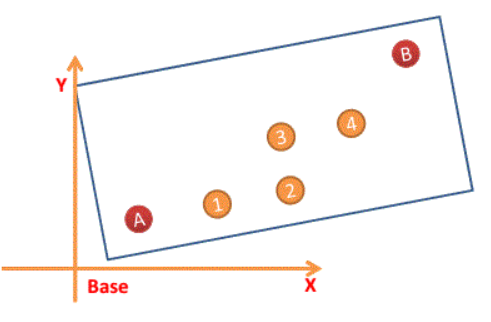
将PCB放置到Robot工作范围内,通过机器人求教或者相机获取的方式,获取A点和B点的Robot坐标,记为PA,PB
PA=XY(100,100,0,0)
PB=XY(450,350,0,0)
转换
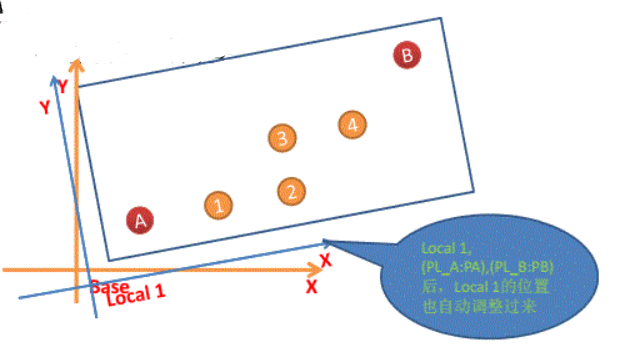
有了参考点AB的CAD位置和在Robot Base坐标中的实际位置,就可以直接计算出Local坐标的位置
Local 1,(PL_A:PA),(PL_B:PB)
此时需要运动到1-4工作点,只需要
jump P1
jump p2
jump p3
jump p4
即可
程序
'记录PCB工作点的Local坐标位置(也可以在点文件中设置)
PL_A=XY(100,100,0,0) /1 '用/1表示Local 1下的坐标
PL_B=XY(500,300,0,0) /1
PL_1=XY(200,100,0,0) /1
PL_2=XY(300,100,0,0) /1
PL_3=XY(300,200,0,0) /1
PL_4=XY(400,200,0,0) /1
'获取参考点的实际位置
PA=XY(100,100,0,0)
PB=XY(450,350,0,0)
'更新Local 1坐标
Local 1,(PL_A:PA),(PL_B:PB)
'移动到工作点
jump p1
jump p2
jump p3
jump p4
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")




:基础知识")


Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





