 少有人走的路
少有人走的路我们定义四个移动点(九点标定简化只用4个),3个旋转点,一个测试点
(图1)
标定的log信息:
09:31:45 机器人连接成功 09:31:45 等待机器人前往标定点1...... 09:32:00 模板位置:0, X:434.266, Y:546.689, U:-0.001 09:32:01 机器人到达标定点1,当前像素坐标为:457.752;443.519机械坐标为:3.703;197.128 09:32:01 等待机器人前往标定点2...... 09:32:05 模板位置:0, X:410.29, Y:1729.093, U:-0.001 09:32:06 机器人到达2号点,当前像素坐标为:433.337;1626.735机械坐标为:3.704;149.502 09:32:06 等待机器人前往标定点3...... 09:32:12 模板位置:0, X:1675.01, Y:1704.728, U:-0.002 09:32:13 机器人到达标定点3,当前像素坐标为:1699.59;1603.143机械坐标为:-46.975;151.532 09:32:13 等待机器人前往标定点4...... 09:32:15 模板位置:0, X:1696.536, Y:588.299, U:0 09:32:16 机器人到达标定点4,当前像素坐标为:1720.933;484.901机械坐标为:-46.975;196.502 09:32:16 开始Tool0下的标定...... 09:32:16 Tool0下标定完成,开始创建工具坐标 09:32:16 等待机器人前往创建工具2号点...... 09:32:20 模板位置:0, X:306.175, Y:1278.832, U:-0.398 09:32:21 机器人到达创建工具2号点,当前像素坐标为:288.633;1175.696 09:32:21 等待机器人前往创建工具3号点...... 09:32:23 模板位置:0, X:1755.333, Y:1418.553, U:0.364 09:32:24 机器人到达创建工具3号点,当前像素坐标为:1815.012;1332.119 09:32:24 等待机器人前往创建工具1号点...... 09:32:26 模板位置:0, X:1077.527, Y:1212.064, U:0 09:32:27 机器人到达标创建工具1号点,当前像素坐标为:1101.158;1109.306机械坐标为:-22.585;170.856 09:32:27 Tool0工具中心经标定关系转化后的坐标为:-14.5131;88.9146 09:32:27 机器人工具1创建完成 09:32:31 模板位置:0, X:1104.374, Y:900.215, U:-0.399 09:32:32 标定精度测试结果:X偏差:0.032mm,Y偏差:0.022mm 09:32:32 标定精度较好 09:32:32 自动标定完成 工具坐标: 81.819,9.472,0,0
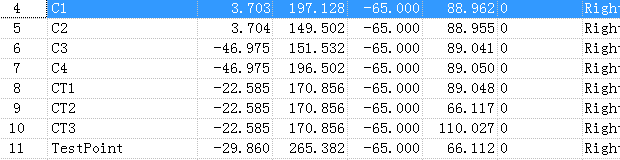
验证四个位置,3个旋转点
我们让机器人分别走c1,c2,c2,c4,ct1,ct2,ct3
视觉依次计算这几个点的特点像素坐标、特征点机械坐标,这时它肯定是tool1下的坐标了。(注意log信息中的机械x,y搞反了)
特征点的像素坐标可以和上面的标定log信息中的像素坐标做对比,看第二次走到这个位置像素偏差了多少。
特征点的机械坐标跟机器人软件中这个点的Tool 1坐标对比。(我们可以把机器人“步进示教”页面中的tool 0切换成tool 1即可,如图2,图3所示)
这样就可以快速验证一下我们的视觉重复性好不好,还有标定结果精度好不好。
09:37:36 标定特征点信息 像素x:458.59 像素y:445.143 机械x:278.994949627852 机械y:-4.42085535572566 09:41:29 模板位置:0, X:410.549, Y:1729.231, U:-0.002 09:41:30 标定特征点信息 像素x:434.158 像素y:1626.306 机械x:231.47110062217 机械y:-4.38338263437648 09:44:16 模板位置:0, X:1675.031, Y:1704.889, U:-0.001 09:44:18 标定特征点信息 像素x:1699.59 像素y:1603.143 机械x:233.463005294083 机械y:-55.0649539415712 09:49:09 模板位置:0, X:1696.186, Y:588.25, U:0 09:49:10 标定特征点信息 像素x:1719.77 像素y:486.562 机械x:278.385967355678 机械y:-54.9835414477465 09:53:38 模板位置:0, X:1077.259, Y:1212.018, U:0 09:53:39 标定特征点信息 像素x:1101.59 像素y:1110.143 机械x:252.789129334033 机械y:-30.7129193471113 09:54:53 模板位置:0, X:306.514, Y:1278.707, U:-0.398 09:54:54 标定特征点信息 像素x:288.417 像素y:1174.686 机械x:249.511989017501 机械y:1.81573611501544 09:55:36 模板位置:0, X:1755.236, Y:1418.492, U:0.364 09:55:37 标定特征点信息 像素x:1813.039 像素y:1332.336 机械x:244.449237890044 机械y:-59.3944955804479

(图2)

(图3)
勇哥把上面的信息组织成一份表,如下:
我们把标定信息中Tool1下的机械坐标减去后来我们算出来的tool1下的机械坐标。
可以看到x,y精度都在+-0.1mm左右
注意: 你可能认为这个精度比较差,但是勇哥测试的机器其视觉任务只是机器人拉带上料,这台机器客户要求取放重复性精度为+-0.5mm。
所以视觉选型时CCD像素较少、视觉又比较大。每像素达都有4,5条了。
如果是类似于手机前摄安装的任务,精度则要能达到+-0.1mm,要求就高许多了。
另外,取放重复性精度,和标定精度是两个概念。后者是验证机器人在标定后走到我指定的像素位置是不是很准。
下表验证的就是标定后的精度。
| 像素x | 像素y | Tool1机械x | Tool1机械y | Tool0机械x | Tool0机械y | x差值 | y差值 | |
| 标定信息 | ||||||||
| 457.752 | 443.519 | -4.283 | 279.106 | 3.703 | 197.128 | 0.137855 | 0.11105 | |
| 433.337 | 1626.735 | -4.272 | 231.481 | 3.704 | 149.502 | 0.111383 | 0.009899 | |
| 1699.59 | 1603.143 | -55.076 | 233.498 | -46.975 | 151.532 | -0.01105 | 0.034995 | |
| 1720.933 | 484.901 | -55.089 | 278.467 | -46.975 | 196.502 | -0.10546 | 0.081033 | |
| 288.633 | 1175.696 | -30.695 | 252.822 | -22.584 | 170.857 | 0.017919 | 0.032871 | |
| 1815.012 | 1332.119 | 1.883 | 249.504 | -22.584 | 170.857 | 0.067264 | -0.00799 | |
| 1101.158 | 1109.306 | -59.502 | 244.486 | -22.584 | 170.857 | -0.1075 | 0.036762 | |
| 0.137855 | 0.11105 | |||||||
| 验证信息 | -0.1075 | -0.00799 | ||||||
| 458.59 | 445.143 | -4.420855356 | 278.9949496 | |||||
| 434.158 | 1626.306 | -4.383382634 | 231.4711006 | |||||
| 1699.59 | 1603.143 | -55.06495394 | 233.4630053 | |||||
| 1719.77 | 486.562 | -54.98354145 | 278.3859674 | |||||
| 1101.59 | 1110.143 | -30.71291935 | 252.7891293 | |||||
| 288.417 | 1174.686 | 1.815736115 | 249.511989 | |||||
| 1813.039 | 1332.336 | -59.39449558 | 244.4492379 |
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


")
")
常用的6种方法")
 封装运动功能")
:有无数组?字符串方法,读写文件,序列化,配置文件,异常处理,循环和选择,模块与包,调试手段")


:与C#不同点,鸭子类型,多线程,多进程编程,访问控制,事件委托实现,lambda表达式,常用内置库,为啥说python简单易用?")


Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





