 少有人走的路
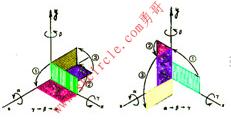
少有人走的路1、摄像机外参:决定摄像机坐标与世界坐标系之间相对位置关系。
其中Pw为世界坐标,Pc是摄像机坐标,他们之间关系为
Pc = RPw + T
式中,T= (Tx,Ty,Tz),是平移向量,R = R(α,β,γ)是旋转矩阵,分别是绕摄像机坐标系z轴旋转角度为γ,绕y轴旋转角度为β,绕x轴旋转角度为α(也可以从左像右看把它理解为先绕x轴旋转α,再绕旋转后的坐标系的y轴旋转β,最后绕再次旋转后的z轴旋转γ)。6个参数组成(α,β,γ,Tx,Ty,Tz)为摄像机外参。

 绕z轴的旋转矩阵,若固连刚体上的定长矢量
绕z轴的旋转矩阵,若固连刚体上的定长矢量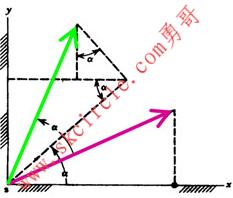
,绕z轴旋转α角,旋转前设:
 由图三角形旋转后的关系可得:
由图三角形旋转后的关系可得:

注意:旋转次序对刚体最终位置有影响,(即旋转次序不可互换)
2、摄像机内参:确定摄像机从三维空间到二维图像的投影关系。
针孔摄像机模型为6个参数(f,κ,Sx,Sy,Cx,Cy)
其中,f为焦距;(在摄像机附带的说明书中可以找到)
κ表示径向畸变量级,如果κ为负值,畸变为桶型畸变,如果为正值,那畸变为枕型畸变。(在标定时设置为0.0)
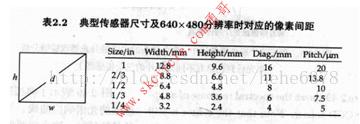
Sx,Sy是缩放比例因子。对针孔摄像机来讲,表示图像传感器上水平和垂直方向上相邻像素之间的距离;(通过查找说明书,找到传感器尺寸比如说1/2.5、分辨率为720*480,由Diag=linch/2.5求出对角线长,然后通过分辨率的最小整数比3:2用勾股定理计算出Width和Height,则可得到Sx=Sy=Pitch=Width/720=Height/480)对于远心摄像机模型,表示像素在世界坐标系中的尺寸。
Cx,Cy是图像的主点。对针孔摄像机来讲,这个点是投影中心在成像平面上的垂直投影,同时也是径向畸变的中心 。(等于图片像素宽、高的一半)
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!



")
")
常用的6种方法")
 封装运动功能")
")






Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")
:与C#不同点,鸭子类型,多线程,多进程编程,访问控制,事件委托实现,lambda表达式,常用内置库,为啥说python简单易用?")





