 少有人走的路
少有人走的路这篇贴子是看了一套网上的手眼标定的培训视频后的记录。
大凡是培训视频,都存在废话很多的问题,关于这一点,其实也是跟你自己的知识储备多少有关,比如对于小白来讲,也许每一句话都不是废话。
本贴就是勇哥记录下来的认为其精华部分内容。
评心而论,老师讲得不错,很有经验,虽然经常在中间插播自己的培训室广告。^-^
----------------------------------------
大家都知道,手眼标定就是确定手和眼的坐标关系。
手指的就是机械手,眼就是CCD。
(一)机械手的分类
常见的四类:
左上角是并联机械手,它的三根爪子电机的坐标系是独立不关联的。这种机械手的特点的是抓取速度快,每分钟可以取放高达120次物料。
右上角是工业六轴机器人,它的每一个轴都可以有一个坐标系,每个轴的坐标系又会对下一个轴产生影响,就像是串联起来一样,所以我们称为串联机械手。它种机器人也会有四轴或者五轴的。
左下角是epson的水平摆动的四轴机械手。
右下角是三轴机械手,常见的有点胶平台,通常使用运动控制卡来控制。

(二)机器人视觉的知识核心
有三点
视觉算法
运动控制算法
正反解运算(正解:每个轴的电机转多少度可以让未端走到x,y,z,反解是反过来),插补算法等
手眼标定
(三)手眼标定需要理解向个坐标系:
有下面这些
机械手基础坐标系
机械手未端坐标系
相机坐标系
相机还可有像素坐标系,对应的物理坐标系(像素毫米关系)
物料平面的工具坐标系(也叫世界坐标)
(四)标定的目的
手眼标定要做的就是,求出这些坐标系之间平移与旋转矢量够成的矩阵关系。
最关键的就是机械手基础坐标系与相机坐标系之间建立的矩阵关系。
如果只是做相机坐标系和物料平面的工具坐标系之间的矩阵关系,我们称为单相机标定,通常用来做测量尺寸之类的应用。
(五)标定方式的分类
(1)九点标定
(2)标定板标定
(六)halcon的九点标定代码
*【1】标定 *1、得到九点标定板在相机坐标系中的像素坐标 area_center (SortedRegions, Area, Row, Column) *2、通过机械手末端走这九个点,得到九点标定板在机械手基础坐标系中的位置 Row1:=[55,50,45,5,0,-5,-50,-50,-50] Column1:=[375,325,270,380,330,280,395,340,290] *3、得到变换矩阵 vector_to_hom_mat2d (Row, Column, Row1, Column1, HomMat2D) *【2】求解 affine_trans_point_2d (HomMat2D, row2, column2, Qx, Qy)
代码的解释参见勇哥另一篇贴子《halcon之手眼标定基本原理》
(七)问题解释:
(一)如下图所示,相机绑定在移动轴上,这个是眼在手上吗?
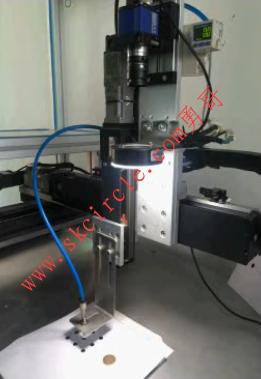
这个也可能是一种相机固定拍照方式。
如果它标定的时候在一个固定位置标定,并且拍照的时候也会移动到这个位置拍照,那么它就是一种固定相机拍照。
这种方式仅仅是因为不方便在这个地方放一个相机支架(因为可能撞机)。
(二)手眼标定,必须九点吗?
不是,但是至少是要求3点以上,为什么呢?
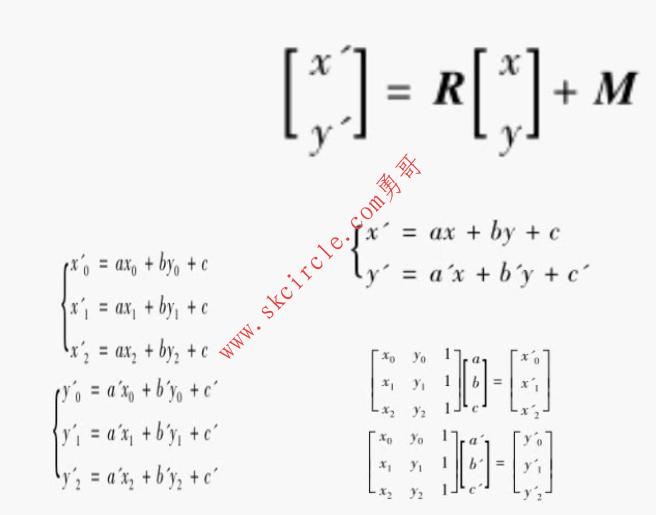
九点标定就是求解上面方程,其中x'y'是已知的机械手的基础坐标系的点,x,y是像素坐标系的点,要求的变量是a, b, c。
(为啥只有x,y没有Z呢,这是因为我们是固定高度标定的, Z没有变化,而单相机也看不到Z)
因为是一个三元一次方程组,必须有3个以上的方程组合起来才可以解出方程。




")
")
常用的6种方法")
 封装运动功能")

:枚举,装饰器,self,类的三种类型,特殊方法,oop,代码格式,方法 ,方法返回类型,识别函数返回类型")
:运行时api的说明")




Qt Widgets Designer界面设计器和界面应用")





