 少有人走的路
少有人走的路手眼标定之介绍
一.机械手类型
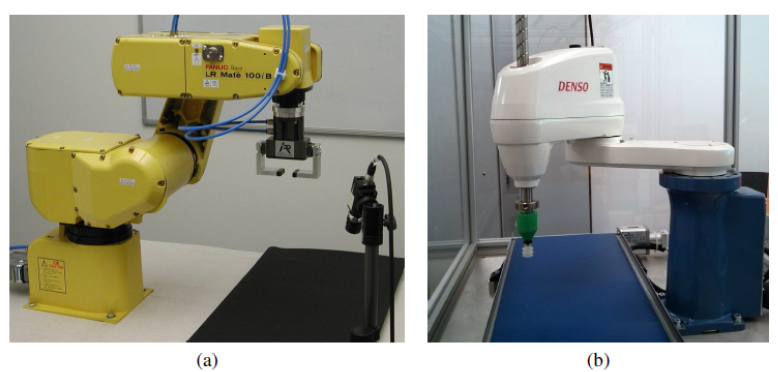
关节机器人:3个关节,6个自由度,即3个旋转3个平移;
SCARA机器人:包括沿X,Y,Z方向的平移和绕U轴旋转的4个自由度,它有3个旋转关节,最适用于平面定位;
二.手眼标定方式
1.固定相机拍照
手眼标定做什么:
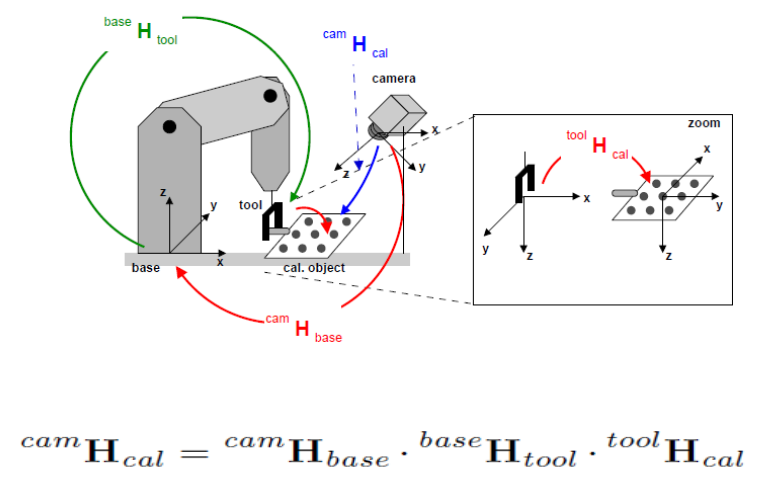
1.1【已知条件】摄像机坐标系下校正对象的位姿;可以通过校正图像获取;![]()
1.2【已知条件】机器人坐标系下机器人工具的位姿;![]()
1.3【未知条件】获取工业摄像机坐标系下为机器人坐标系的位姿;
1.4【未知条件】获取机器人工具坐标系下校正对象坐标系的位姿;
求出未知条件,再加已知条件,从而获取机器人坐标系下校正对象的位姿;要抓取一个物体,机器人坐标中的夹具位姿必须与机器人坐标中物体的位姿相同;
有夹具和没有夹具区别:
如下图,6轴关节机器人的红色部分夹具端,绿色部分为工具端。
下面的公式中,gripper为夹具,tool为工具。
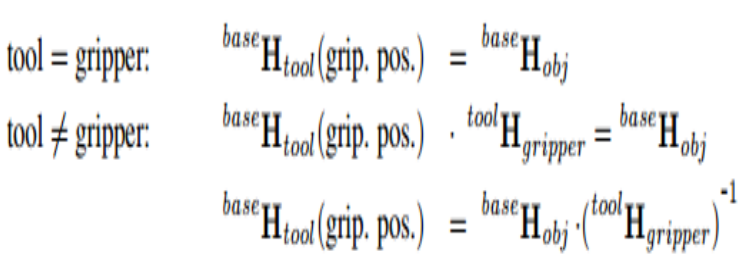
![]() 为机器人坐标系下的工具位置。
为机器人坐标系下的工具位置。
如果机器人工具位置就夹具位置,则:
机器人坐标系下的工具位置就等于机器人坐标系下的要抓取对象的位置。
如果机器人工具位置不等于夹具位置,则:
机器人坐标系下的要抓取对象位置乘以 工具坐标系下的夹具坐标系。
2.移动相机拍照
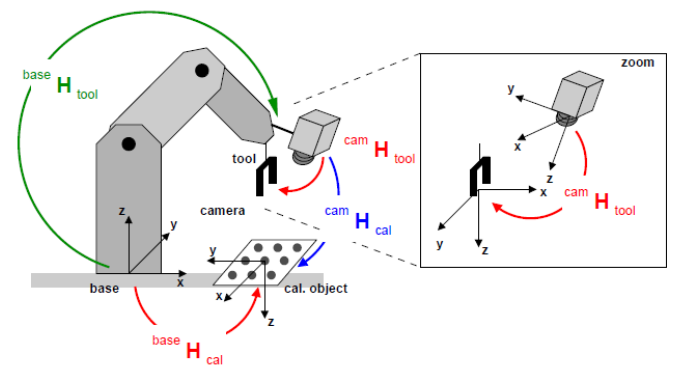
![]()
手眼标定做什么:
1.1【已知条件】摄像机坐标系下校正对象的位姿;可以通过校正图像获取;
1.2【已知条件】机器人坐标系下机器人工具的位姿;
1.3【未知条件】获取工业摄像机坐标系下机器人工具坐标系的位姿;
1.4【未知条件】获取机器人坐标系下校正对象坐标系的位姿;
求出未知条件,再加已知条件,从而获取机器人坐标系下校正对象的位姿;要抓取一个物体,机器人坐标中的夹具位姿必须与机器人坐标中物体的位姿相同;
有夹具和没有夹具区别:

三.相关符号表示
 :表示齐次变换矩阵,包含旋转和平移向量,通过这个齐次变换矩阵可以实现坐标系c1转换为新的坐标系c5.
:表示齐次变换矩阵,包含旋转和平移向量,通过这个齐次变换矩阵可以实现坐标系c1转换为新的坐标系c5.
 :表示齐次变换矩阵,包含旋转和平移向量,通过这个齐次变换矩阵可以实现新坐标系tool转换为旧的坐标系base.
:表示齐次变换矩阵,包含旋转和平移向量,通过这个齐次变换矩阵可以实现新坐标系tool转换为旧的坐标系base.




")
")
常用的6种方法")
 封装运动功能")
:有无数组?字符串方法,读写文件,序列化,配置文件,异常处理,循环和选择,模块与包,调试手段")





Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





