 少有人走的路
少有人走的路勇哥注:
CanLink轴控是汇川特有协议下的轴控功能。
注意选择伺服驱动器时需要:IS620P-C或者 SV660A 才可以支持CanLink轴控。
硬件接线
勇哥手里的h3u自带Can接口:
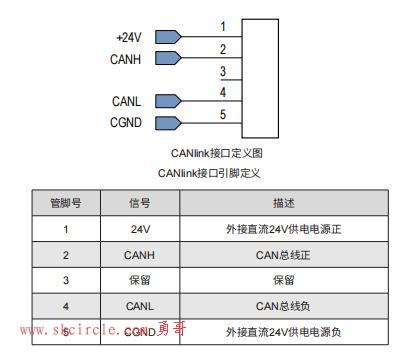
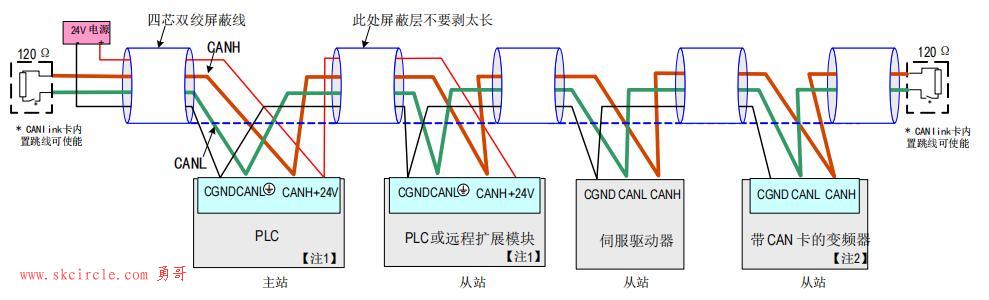
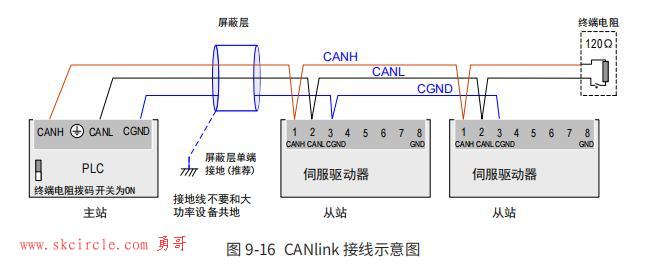
组成CAN网络时,所有设备的以上五根线均要一一对应连在一起。并且 24V和CGND间需要外接24V直流电源。总线的两端均要加120欧姆的CAN总线匹配电阻。CAN接线图如下图所示:
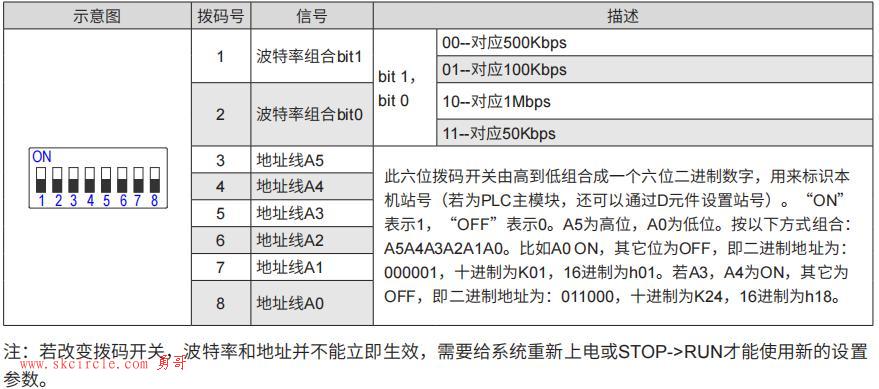
然后就是拔码,勇哥手里的h3u拔码如上:

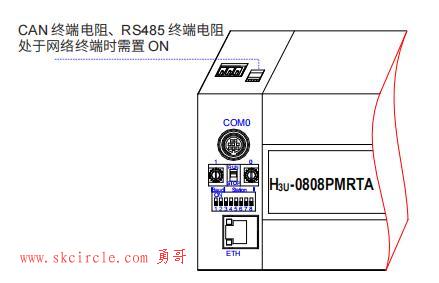
终端电阻如下:

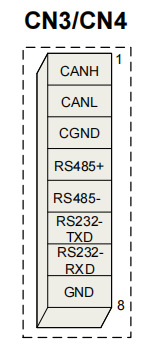
伺服端的硬件接线。
上图说的CANH和CANL指的是sv660p伺服驱动器的CN3和CN4口
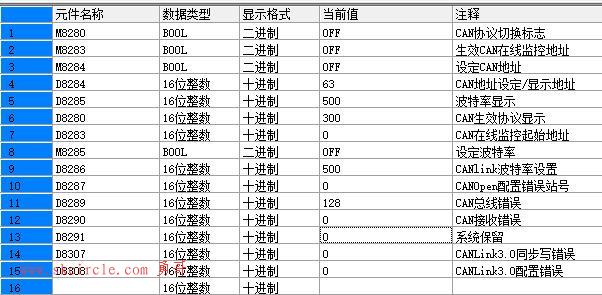
有关CanLink通讯的元件变量如下:
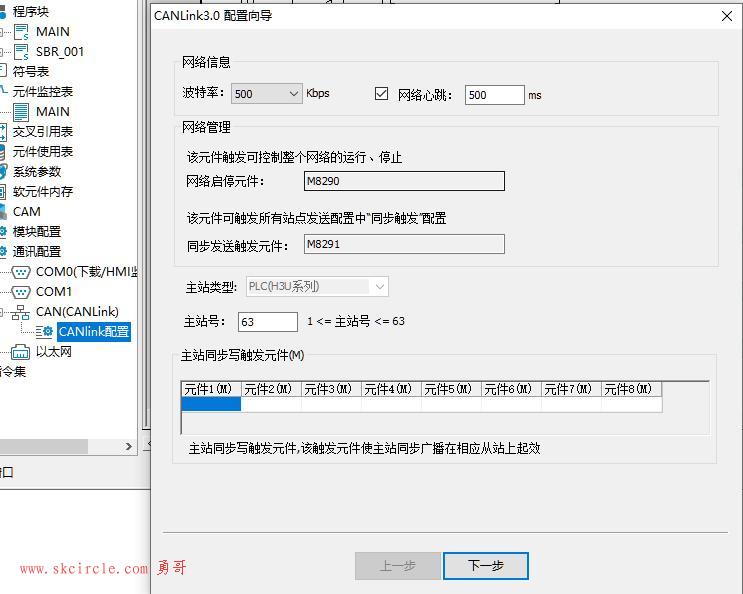
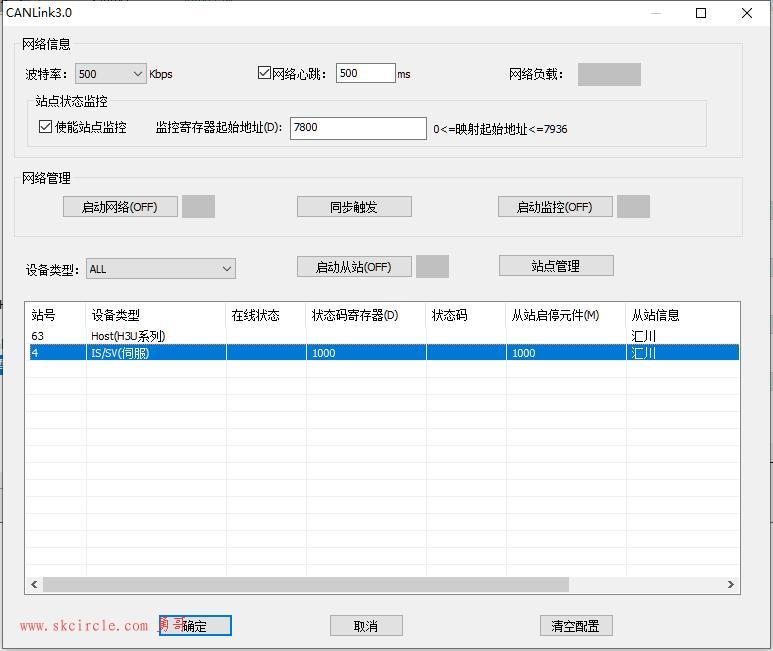
CANLink软件配置
CANLink主站配置:
Canlink轴控前的准备
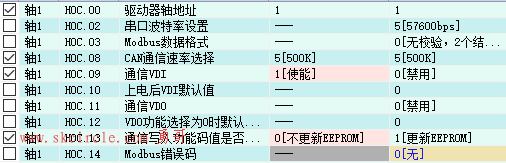
(1)伺服驱动器端的设置
全能和报警复位信号依下面设置,否则会引发Er130

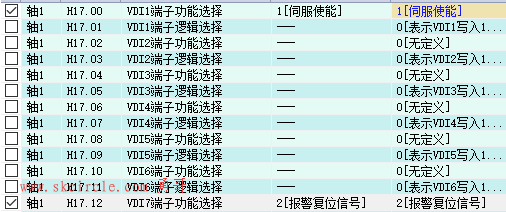
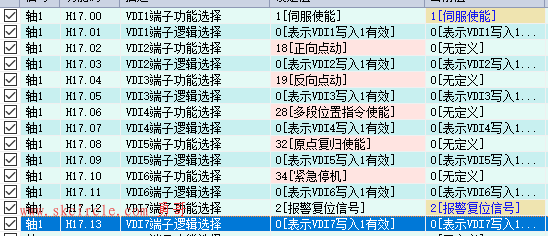
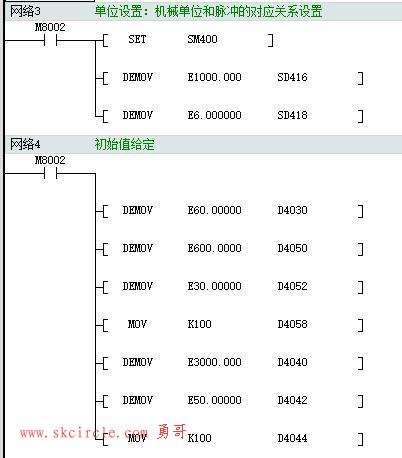
其它的一些必须设置的项目:
h3u的Can指示灯的显示

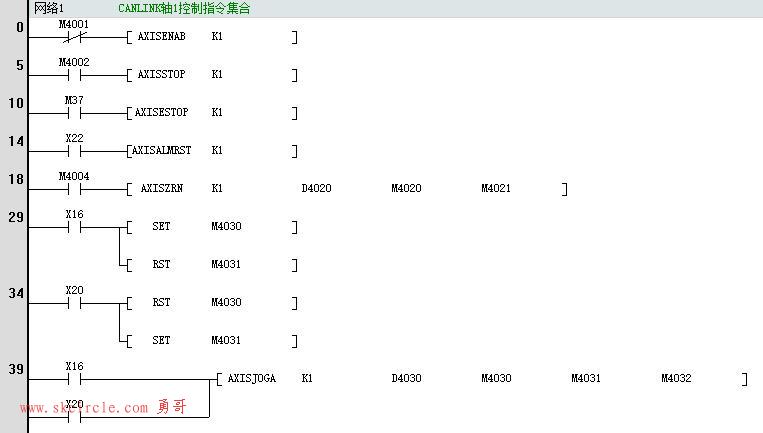
测试jog运动的代码
按下x22轴报警复位
按下x16正向jog运动,松手停止
按下x20反向jog运动,松手停止。
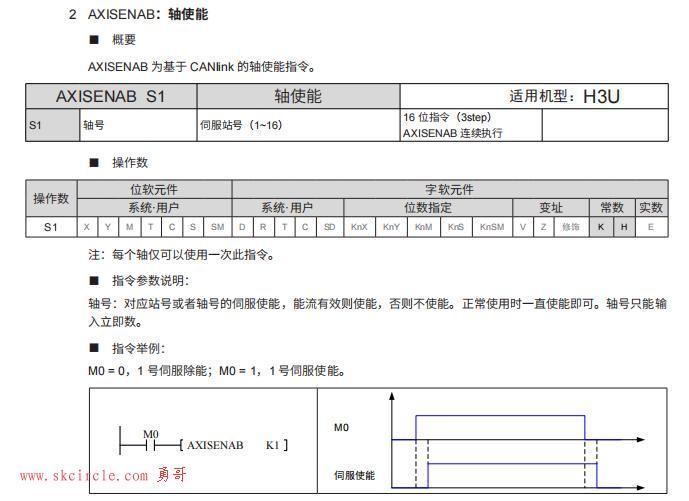
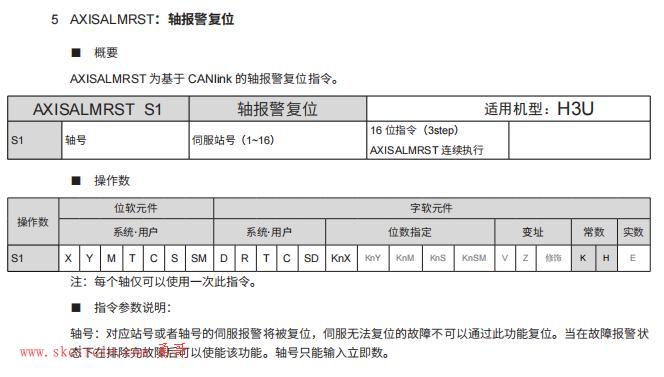
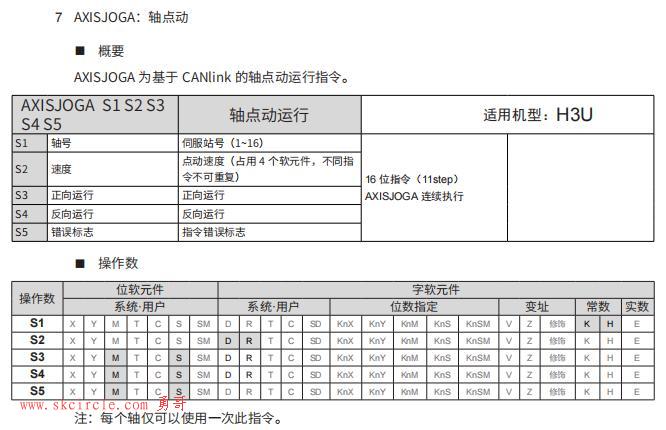
■ 指令参数说明:
轴号:需要控制点动的伺服站号或轴号
速度:整数或浮点数,D 元件或者 R 元件。单位和换算关系参考 AXISDRVA。注意:会连续占用 4 个字元件。其中本参数占用 2 个,指令状态机占用 2 个。速度设置为 0,将按照默认值 100 进行设定。
正向点动:M 或者 S 元件,指令使能时且该位为 ON 时正向动作,改位为 OFF 时停止。
反向点动:M 或者 S 元件,指令使能时且该位为 ON 时反向动作,改位为 OFF 时停止。
错误标记:当发生错误时置位。置位原因如下:
1) 驱动器未使能(AXISENAB 指令未导通)。
2) 速度或者位置未成功写入。
3) 驱动器报警。
4) 指令间冲突(定位、点动、停止定位或者急停指令不可以同时触发)。 使能断开后会复位完成标志以及错误标记。
注意事项 1:正向反向同时使能则不动作。
注意事项 2:速度只会在指令导通时写入一次。
测试时出现的错误和警告
勇哥测试时出现下面的警告,貌似按下x22进行轴复位后,还是可以正常jog运动。
经研究发现是因为在代码里使用了AXISZRNA增强轴控回原指令,就会出现此警告。
目前不知道是IS620P不支持此轴控指令,还是驱动器的设置有问题造成的此指令报警?

---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")
:枚举,装饰器,self,类的三种类型,特殊方法,oop,代码格式,方法 ,方法返回类型,识别函数返回类型")





Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





