 少有人走的路
少有人走的路在 运动控制 的场合,选择适合的 坐标系 是很重要的.不同的机械结构或应用,适合的坐标系也不同.本文针对常见的 直线 与 分度座标,加以说明其特性与适用场合.一般而言,机械根据末端形式可区分为二类:(1)有限行程,(2)无限行程,代表性的例子分别如下:
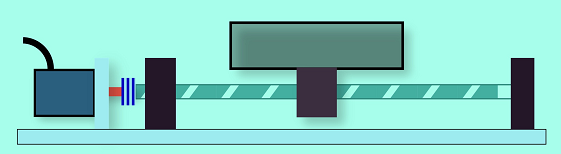
1,螺杆机构:二端有死点,行程有限,无週期性
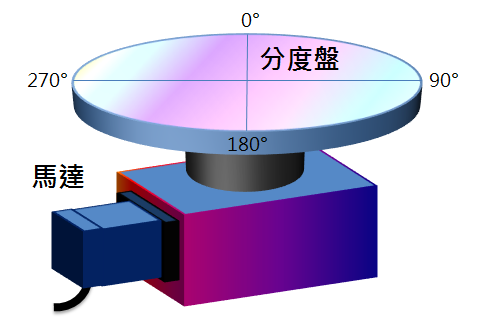
2,分度盘机构:没有死点,行程无限,有週期性
週期性是指,马达即使只往单方向旋转,机构也会回到原来的位置,有周而復始的特性.现在的问题是:我们用伺服马达来推动机构,可以知道马达的位置(PLS),但真正关心的是机构(末端)的位置,马达转到哪裡其实不重要!那麽,该如何得到机构末端的位置呢?
直线坐标 位置计算:
以螺杆机构而言,机械的位置 与 马达旋转的脉波数 是 线性关係的:
机械位置 L(PUU)= 马达脉波数(PLS)× 单位转换 ...(1)[注 1]
这个 ” 单位转换” 其实就是 电子齿轮比,L 表示机械末端的位置(PUU),与 马达的脉波(PLS)是线性关係,所以 L 建立的坐标系就称为 直线座标系,适合用来描述 直线运动机构 的位置!
分度坐标 位置计算:
然而,直线座标 适合 螺杆机构 却不适合 分度盘,因为分度盘的位置永远在360度的范围内,不会随马达旋转 无穷的变大.假设马达转4圈,分度盘刚好转1圈,且马达1圈对应的L=10000 PUU,若 马达转了 4,8,12 圈,则 分度盘分别转 1,2,3 周,最终 角度 都一样,但对应的 L=40000,80000,120000,… 却不一样!所以,用L来表示分度盘的位置并不适合,因为我们通常只在意最后的角度 而不是分度盘转了几週!所以必须定义一个新的坐标系来表示分度盘的位置,就是 分度座标,定义如下:
分度坐标 C(PUU)= MOD(L/L0)...(2)[注 2]
MOD:取得 除法的馀数.
L0 :分度坐标周长(PUU),即 分度一周 对应的L数量!
同上面的例子:分度盘转1圈,马达转4圈,所以L0 =40000,假设马达转了 123 圈,分度盘的角度在哪裡呢?此时 L=1230000,很难看得明白,然而(2)式得到的分度坐标 C=30000,等于 3/4 周(L0 =40000),就能清楚知道目前在 270° 的位置了!因此 这类 旋转机构 的位置用 分度座标 来描述要比 线性座标 清楚多了,使用上也更直觉!整理结论如下:
机构 有限行程:无週期性,有极限,适用 直线座标
机构 无限行程:有週期性,无极限,适用 分度座标
有了 分度坐标,运动控制器 就可以提供 分度定位 的命令,在 分度工作站,刀库,刀塔,电子凸轮,都有很多的应用机会!
参考:分度/直线 坐标的比较.
[注 1] 此为不考虑全闭环的情况,否则须将式中 马达脉波数 更改为 光学尺 或 辅助编码器 的脉波.
[注 2] 此式是数学上的表示法,实际计算时,因机构是无限行程,位置 L 会发生溢位,处理方法略为複杂!所以 分度坐标 不该由使用者来计算,而是由系统自动计算,才是功能完整的 运动控制器!




")
")
常用的6种方法")
 封装运动功能")

:有无数组?字符串方法,读写文件,序列化,配置文件,异常处理,循环和选择,模块与包,调试手段")
:随机对象源,用于生成随机摆放的物料")
:枚举,装饰器,self,类的三种类型,特殊方法,oop,代码格式,方法 ,方法返回类型,识别函数返回类型")


Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





