 少有人走的路
少有人走的路引言:
一般来说,工业上的运动控制上我们要么使用运动控制板卡,要么直接使用带脉冲输出功能的PLC。一般运动较多的案子,使用PLC要更适合一些,这是因为插上运动板卡、运行着windows操作系统的工业电脑并不是绝对可靠的。因为windows是一个抢占式多任务系统,如果系统上跑着一些有bug的程序、或者中了病毒,你的工作软体可能会出现各种奇怪的问题。而且单纯从硬件上来看,电脑的硬盘比较脆弱,运动控制板卡因品牌而异本身可能存在bug。至少笔者使用某品牌的运动控制卡,是相当害怕其在高速运动下有撞机的风险。而PLC相当于专用电脑,只跑用户程序,永远以固定时序执行用户程序,没有了工控机方案的各种毛病。PLC的缺点是不可以海量处理数据、不可能处理视觉、不可能保存海量数据等等。
研华的这款MAS控制器,本身就是一台电脑,上面插有运动控制卡,运行了一套控制软体+编程环境。
你使用其专用的BASIC指令,可以几句话搞定运动,一方面大大降低了编程工作量,另一方面由它的控制软体托管了运动相关的硬件,由研华的软硬件系统保证运动可靠性和稳定性。并且由于MAS控制器本身是一台装有win7系统的工业电脑,所以PLC的那些缺点就不存在了。
可谓是集合IPC和PLC两方面的优点于一身。
笔者的看法是,用户对这款产品最关心的可能只会有三方面:
1. 系统本身的可靠性
2. 是否足够方便
3. 价格问题。
第1个方面,系统本身的可靠性需要大量小白鼠用户铺垫出来,工程经理们会按项目本身的重要性选择是否尝试没有在行业内大规模流行的产品。
第2个方面可能比第3个方面更重要,公司领导更关心的是这款产品能否有助于解决人力短缺的问题,如果这款控制器能让技术员也能上手,就不用苦于工程师们严重短缺了。
第3个方面的问题是指:如果用这套控制器,那么是否比原来的IPC+运动控制卡+高级语言的方案、或者PLC的方案要便宜吗?
好了,闲话不说了,我们来看下这款运动控制器
(一).研华MAS控制器产品的组成
MAS控制器可以理解为是: 一台IPC+ 板卡(运动卡,IO卡)+ Motion studio软体
对于套件则包括:IPC及其内部板卡,Motion studio软体
也可以散件: 用户提供IPC,研华提供板卡(运动控制卡和IO卡),Motion studio软体
Motion studio软体只认识与其专配的版卡,其它厂商的板卡和研华的早期版卡不被支持。
Motion studio软体安装在MAS控制器内,用户不需要另外购买IPC。
Motion studio软体分为两部分: studio和 runtime。前者提供代码编辑、调试编译、辅助调试功能,后者是后台运行的支持环境,全部硬件层的支持都是由runtime提供。
调试的时候也可以在笔记本上安装Motion studio,再连接控制器调试程序。
MAS控制器本身预装有Win7 64位版本,可以预装客户其它所需要的软件。
(二)研华MAS控制器的几个优点
1. 代码语言使用basic,类似于机械手语言,比较简单。
2. 同时最大运行10个task,相当于10个进程同时执行,进程间使用VR变数来进行通讯。
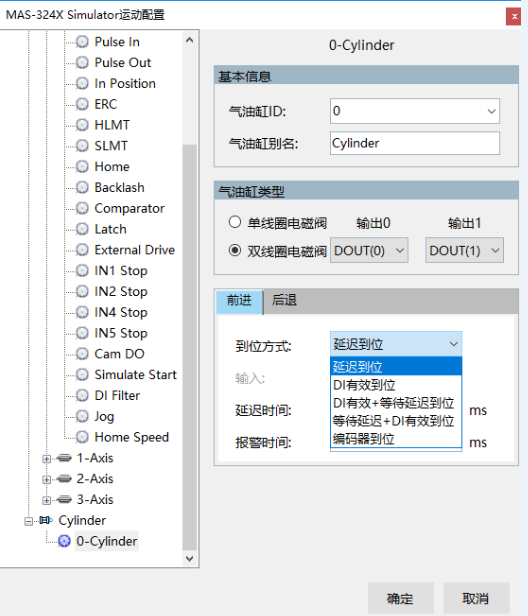
3. 轴的属性都是面板参数化设定。比如有特点的是有气缸也有对应的设定。
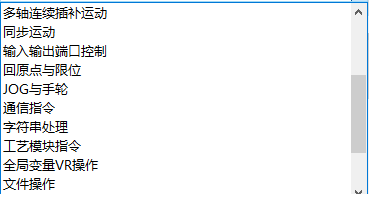
4. 由于MAS控制器是PC-Based控制器,因此其指令集丰富,有些指令非常方便用于编程。
“通信指令” 包括对 串口、TCP/IP两种接口的操作,和对Modebus 协议的操作指令。
“文件操作”包括对文本、二进制文件的读写操作
“Robot控制” 提供对机械手本体的控制器算法
“工艺模块指令”提供了对诸如气缸操作的指令。
“字符串处理”,如其名。
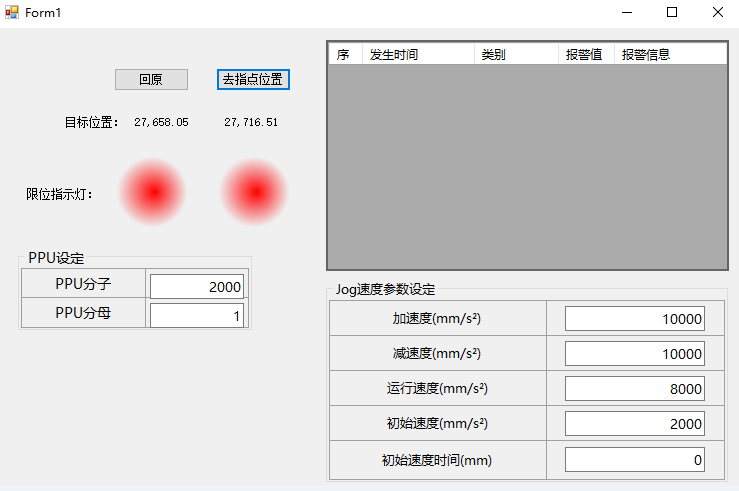
5. 界面可以使用 ,模态软件加触摸屏,也可以使用C#编辑界面。
下图是C#制作的界面。界面控件都是由MAS软体导入的专用控用,以方便与MAS控制器对接。
注意仅仅只需要在C#环境内拖入控件,做一些设定。并没有编写一句C#代码。
6. VR 共享变量。不仅用于控制器程序多个task之间通讯,界面与MAS控制器之间通讯。 还可以用C#来读写VR变量。这样C#与MAS控制器之间通讯除了tcp/ip外,多了一种高效的手段。
7. 视觉与MAS控制器集成
目前版本的MAS控制器没有视觉部分,据说后续版本会加入。
现在只能使用通讯机制在视觉程序和MAS控制器之间进行数据传递,以此方式进行集成。
8. MAS控制器与机械人
目前只能使用通讯方式与机械人进行互动,MAS控制器自带的robot指令,仅用于机器人本体(无控制器)做控制器使用。
(三)总结:
结论:该控制器实际上用basic指令方式拖管了 IO、气缸、运动控制、多线程、tcp/rs232/modbus通讯,文件读写 这些机器编程常见的工作。
又因为该控制器实际上是pc-based方式,本身装的就是win7系统,因此C#代码也可以编写到控制器上面。
所以对于简化机器软件编程,有非常好的助力,并且对于成本控制也有好处。
最后笔者比较下同类产品与研华MAS的区别。
比如翠欧(TRIO)运动控制器,它类似于PLC一样是专用的控制器.
而研华MAS是PC-Based(用工业电脑),因此,从理论上来说,翠欧运动控制器运动控制器应该如同PLC一样高度可靠性。而研华MAS这方面有不确定性。这是因为控制器还要运行用户的软件,你即使能拍胸口保证自己的控制器软硬件绝对可靠,但是你无法阻止用户在上面瞎搞,一些有bug的软件或者病毒之类的会影响控制器的运行稳定性。
从功能上来看,研华MAS因为是PC-Based的,因此可以享用windows操作系统带来的强大功能,并且也因此和用户的程序能更好的配合。这点是翠欧运动控制器比不了的。
研华MAS的官方网址:
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





