 少有人走的路
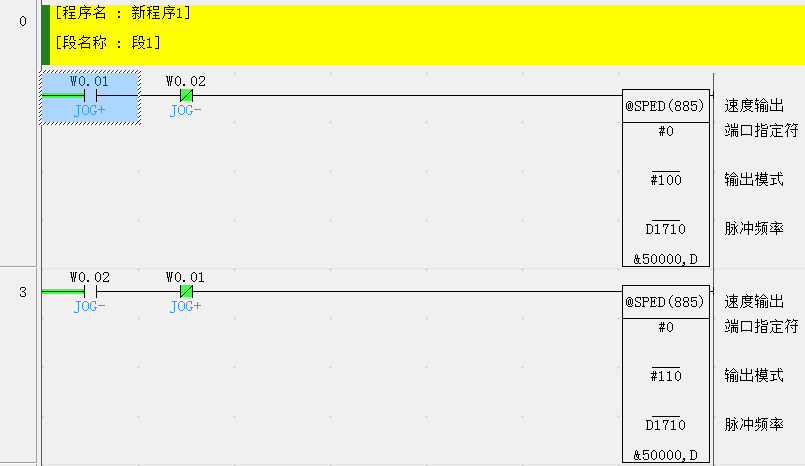
少有人走的路如果只是JOG+,JOG-,请参考程序第0,3步的演示。
第0步往正方向运动,第3步往负方向运动。
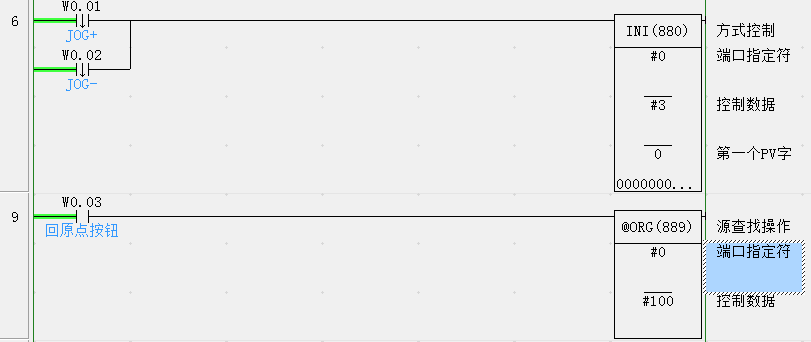
如果w0.01或者w0.02断开,则调用第6步的INI指令停止轴运动。
第9步调用指令ORG回原点。第10步用来中止回原点动作。
回原点的方向、速度、回原点的方式都是通过“设置”面板来设定的。
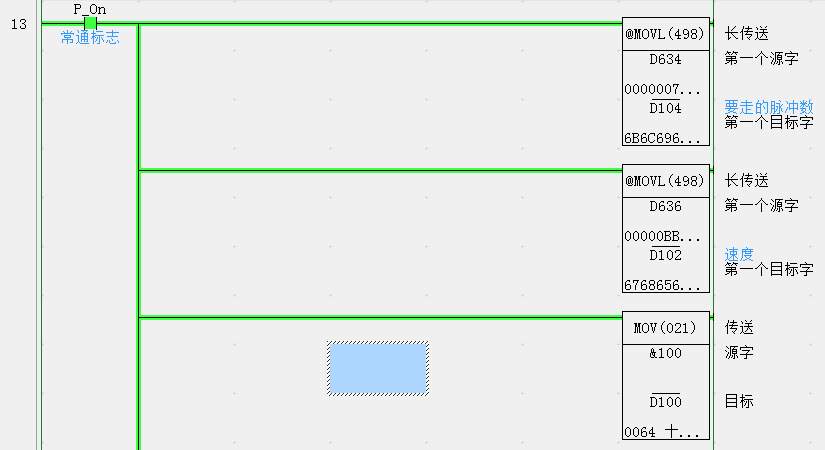
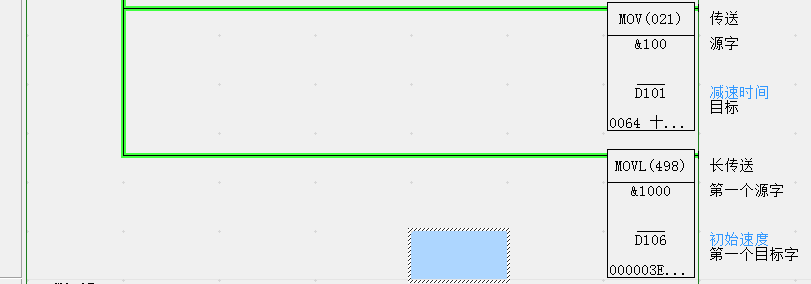
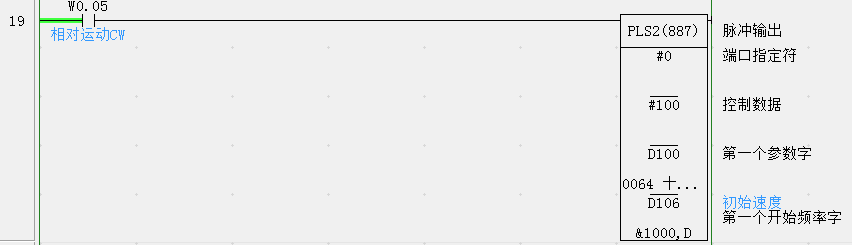
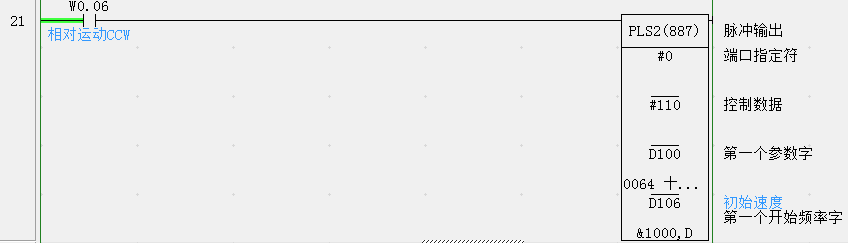
第19,20步发固定脉冲走距离,CW是正方向转动,CCW为负方向转动。第13步为走固定脉冲的指令提供参数设定。

---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
其它相关文章:
欧姆龙cp1h常用指令学习(十五)多重互锁指令MILH,MILC
欧姆龙cp1h常用指令学习(四)串口无协议读写指令TXD,RXD
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")
:功能介绍")






Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





