 少有人走的路
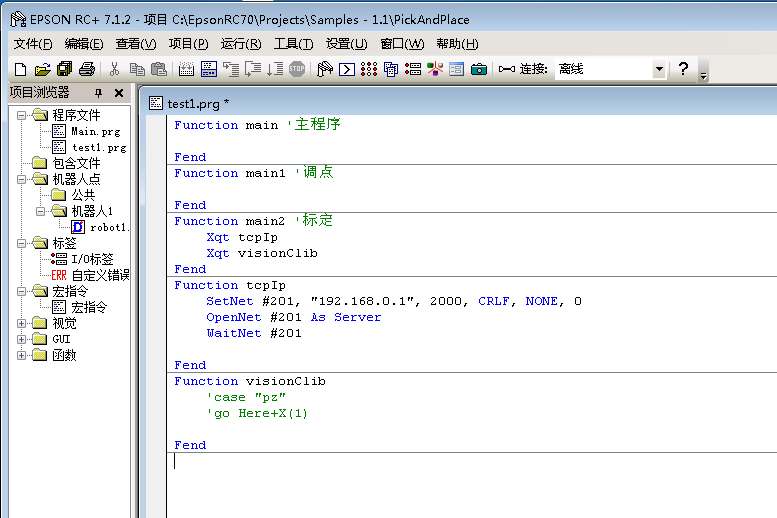
少有人走的路勇哥写的演示框架如下图所示。
通过run main1, run main2 这样的指令可以启动不同的main程序。
因此可以在触摸屏上可以用按钮启动不同的机器人程序。
我们知道启动“远程以太网”模式后,在运行窗口中就不能再选择启动自定义的函数了。
但是我们可以像main2函数中那样,启动一个线程,来监听#201端口,然后处理传入的字符串进行case分支处理。
这种方式就实现了两种模式可以兼得。
相当于plc可以用远程以太网控制机器人,我们上位机这边则通过事先在机器人内部写好代码,通过#201端口的方式执行机器人内部的程序。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:


")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")
:与C#不同点,鸭子类型,多线程,多进程编程,访问控制,事件委托实现,lambda表达式,常用内置库,为啥说python简单易用?")





