 少有人走的路
少有人走的路首先使用拍照工具拍摄一些JPG格式的标定图片。然后放到特定的文件夹下,我这里是image文件夹。
在标定前,首先读取该文件夹下的图片文件,获取这些图片文件的文件名,以备将来opencv读取图片使用。这样做的好处是不用特意给拍摄的图片按照特定格式重新命名,大大减小了工作量。
标定时,程序会检查这些图片是否能正常提取格点,如果不能,程序自动舍去,在标定时该幅图片不参与计算。
标定完成后,程序会把标定结果显示到控制图上,并把标定的更详细结果写入的txt文件。
用到的opencv版本的2.4.10,vs版本是2010。
具体的工程下载地址在上传后会放到评论里。
#include <iostream>
#include <fstream>
#include <io.h>
#include "opencv2/opencv.hpp"
using namespace cv;
using namespace std;
#define BOARD_SCALE 20
#define BOARD_HEIGHT 6
#define BOARD_WIDTH 8
//获取某一文件夹的所有文件名
void getFiles(string path, vector<string>& files)
{
//文件句柄
long hFile = 0;
//文件信息,声明一个存储文件信息的结构体
struct _finddata_t fileinfo;
string p;//字符串,存放路径
if ((hFile = _findfirst(p.assign(path).append("\\*").c_str(), &fileinfo)) != -1)//若查找成功,则进入
{
do
{
//如果是目录,迭代之(即文件夹内还有文件夹)
if ((fileinfo.attrib & _A_SUBDIR))
{
//文件名不等于"."&&文件名不等于".."
//.表示当前目录
//..表示当前目录的父目录
//判断时,两者都要忽略,不然就无限递归跳不出去了!
if (strcmp(fileinfo.name, ".") != 0 && strcmp(fileinfo.name, "..") != 0)
getFiles(p.assign(path).append("\\").append(fileinfo.name), files);
}
//如果不是,加入列表 ,这里进行了判断,只有是.jpg的文件才加入列表
else
{
string a=".bmp";
string b=".jpg";
string::size_type idx1,idx2;
char* temp = fileinfo.name;
string temp1 = temp;
idx1=temp1.find(a);
idx2=temp1.find(b);
if(idx1 == string::npos && idx2 != string::npos )
files.push_back(p.assign(path).append("\\").append(fileinfo.name));
}
} while (_findnext(hFile, &fileinfo) == 0);
//_findclose函数结束查找
_findclose(hFile);
}
}
void main()
{
vector<string> files;
files.clear();
string filePath = "image/";
getFiles(filePath, files );
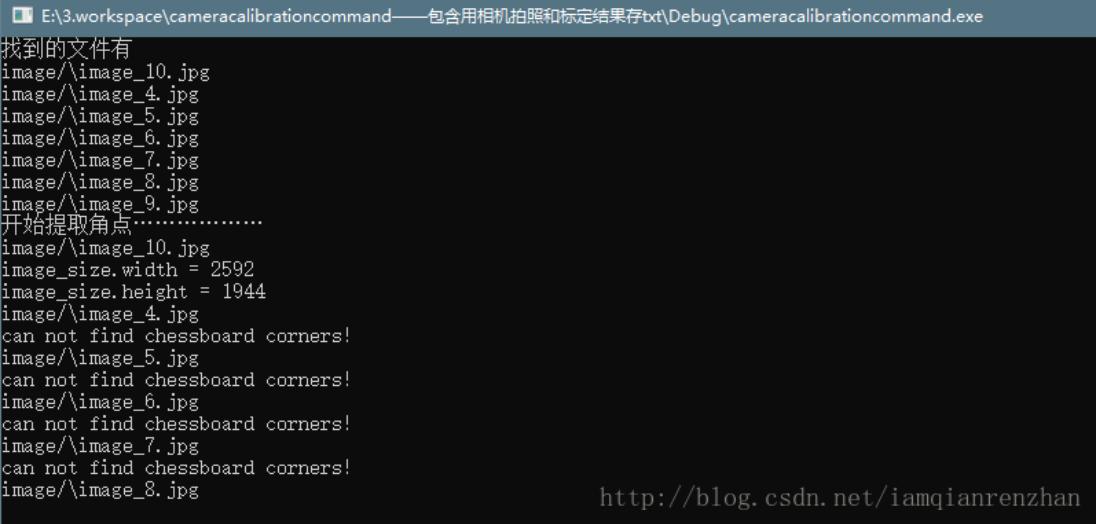
cout << "找到的文件有"<< endl;
for(int i = 0;i<files.size();i++)
{
cout << files[i] <<endl;
}
//读取每一幅图像,从中提取出角点,然后对角点进行亚像素精确化
cout<<"开始提取角点………………"<<endl;
int image_count=0; /* 图像数量 */
Size image_size; /* 图像的尺寸 */
Size board_size = Size(BOARD_HEIGHT,BOARD_WIDTH); /* 标定板上每行、列的角点数 */
vector<Point2f> image_points_buf; /* 缓存每幅图像上检测到的角点 */
vector<vector<Point2f>> image_points_seq; /* 保存检测到的所有角点 */
for(int i = 0;i<files.size();i++)
{
cout<<files[i]<<endl;
Mat imageInput=imread(files[i]);
/* 提取角点 */
if (0 == findChessboardCorners(imageInput,board_size,image_points_buf))
{
cout<<"can not find chessboard corners!\n"; //找不到角点
continue;
}
else
{
//找到一幅有效的图片
image_count++;
if (image_count == 1) //读入第一张图片时获取图像宽高信息
{
image_size.width = imageInput.cols;
image_size.height =imageInput.rows;
cout<<"image_size.width = "<<image_size.width<<endl;
cout<<"image_size.height = "<<image_size.height<<endl;
}
Mat view_gray;
cvtColor(imageInput,view_gray,CV_RGB2GRAY);
/* 亚像素精确化 */
//find4QuadCornerSubpix(view_gray,image_points_buf,Size(5,5)); //对粗提取的角点进行精确化
cornerSubPix(view_gray, image_points_buf,
Size(5,5),
Size(-1,-1),
TermCriteria(TermCriteria::MAX_ITER + TermCriteria::EPS,
30, // max number of iterations
0.1)); // min accuracy
image_points_seq.push_back(image_points_buf); //保存亚像素角点
/* 在图像上显示角点位置 */
drawChessboardCorners(view_gray,board_size,image_points_buf,true); //用于在图片中标记角点
//写入文件
string filePath = files[i];
filePath+=".bmp";
imwrite(filePath,view_gray);
}
}
int total = image_points_seq.size();
cout<< "共使用了"<<total << "幅图片"<<endl;
cout<<"角点提取完成!\n";
cout<<"开始标定………………\n";
/*棋盘三维信息*/
Size square_size = Size(BOARD_SCALE,BOARD_SCALE); /* 实际测量得到的标定板上每个棋盘格的大小 */
vector<vector<Point3f>> object_points; /* 保存标定板上角点的三维坐标 */
/*内外参数*/
Mat cameraMatrix=Mat(3,3,CV_32FC1,Scalar::all(0)); /* 摄像机内参数矩阵 */
vector<int> point_counts; // 每幅图像中角点的数量
Mat distCoeffs=Mat(1,5,CV_32FC1,Scalar::all(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */
vector<Mat> tvecsMat; /* 每幅图像的旋转向量 */
vector<Mat> rvecsMat; /* 每幅图像的平移向量 */
/* 初始化标定板上角点的三维坐标 */
int i,j,t;
for (t=0;t<image_count;t++)
{
vector<Point3f> tempPointSet;
for (i=0;i<board_size.height;i++)
{
for (j=0;j<board_size.width;j++)
{
Point3f realPoint;
/* 假设标定板放在世界坐标系中z=0的平面上 */
realPoint.x = i*square_size.width;
realPoint.y = j*square_size.height;
realPoint.z = 0;
tempPointSet.push_back(realPoint);
}
}
object_points.push_back(tempPointSet);
}
/* 初始化每幅图像中的角点数量,假定每幅图像中都可以看到完整的标定板 */
for (i=0;i<image_count;i++)
{
point_counts.push_back(board_size.width*board_size.height);
}
/* 开始标定 */
calibrateCamera(object_points,image_points_seq,image_size,cameraMatrix,distCoeffs,rvecsMat,tvecsMat,CV_CALIB_RATIONAL_MODEL);
cout<<"标定完成!\n";
//对标定结果进行评价
ofstream fout("caliberation_result.txt"); /* 保存标定结果的文件 */
double total_err = 0.0; /* 所有图像的平均误差的总和 */
double err = 0.0; /* 每幅图像的平均误差 */
vector<Point2f> image_points2; /* 保存重新计算得到的投影点 */
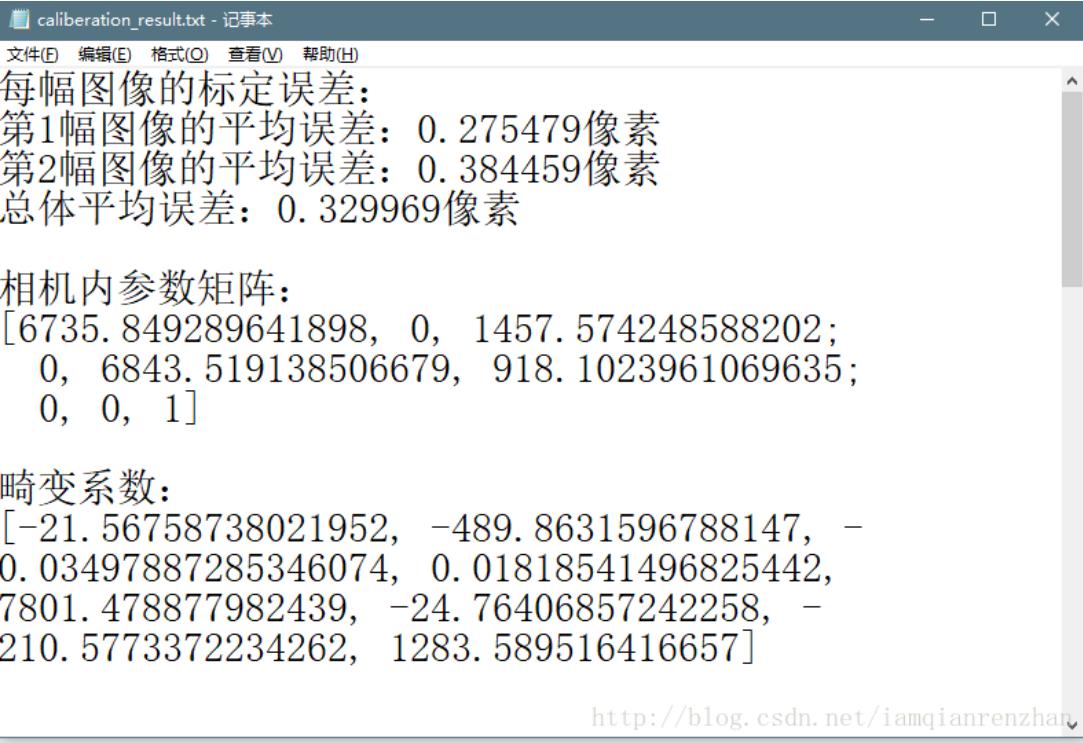
cout<<"\t每幅图像的标定误差:\n";
fout<<"每幅图像的标定误差:\n";
for (i=0;i<image_count;i++)
{
vector<Point3f> tempPointSet=object_points[i];
/* 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 */
projectPoints(tempPointSet,rvecsMat[i],tvecsMat[i],cameraMatrix,distCoeffs,image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector<Point2f> tempImagePoint = image_points_seq[i];
Mat tempImagePointMat = Mat(1,tempImagePoint.size(),CV_32FC2);
Mat image_points2Mat = Mat(1,image_points2.size(), CV_32FC2);
for (int j = 0 ; j < tempImagePoint.size(); j++)
{
image_points2Mat.at<Vec2f>(0,j) = Vec2f(image_points2[j].x, image_points2[j].y);
tempImagePointMat.at<Vec2f>(0,j) = Vec2f(tempImagePoint[j].x, tempImagePoint[j].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err/= point_counts[i];
cout<<"第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<endl;
fout<<"第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<endl;
}
cout<<"总体平均误差:"<<total_err/image_count<<"像素"<<endl;
fout<<"总体平均误差:"<<total_err/image_count<<"像素"<<endl<<endl;
//保存定标结果
cout<<"开始保存定标结果………………"<<endl;
Mat rotation_matrix = Mat(3,3,CV_32FC1, Scalar::all(0)); /* 保存每幅图像的旋转矩阵 */
fout<<"相机内参数矩阵:"<<endl;
fout<<cameraMatrix<<endl<<endl;
fout<<"畸变系数:\n";
fout<<distCoeffs<<endl<<endl<<endl;
for (int i=0; i<image_count; i++)
{
fout<<"第"<<i+1<<"幅图像的旋转向量:"<<endl;
fout<<tvecsMat[i]<<endl;
/* 将旋转向量转换为相对应的旋转矩阵 */
Rodrigues(tvecsMat[i],rotation_matrix);
fout<<"第"<<i+1<<"幅图像的旋转矩阵:"<<endl;
fout<<rotation_matrix<<endl;
fout<<"第"<<i+1<<"幅图像的平移向量:"<<endl;
fout<<rvecsMat[i]<<endl<<endl;
}
cout<<"完成保存"<<endl;
fout<<endl;
while(1);
return ;
}控制台运行过程截图:
生成的txt截图:
参考的博客:
http://blog.csdn.net/honyniu/article/details/51004397
http://blog.csdn.net/dcrmg/article/details/52939318
源码下载链接:
http://download.csdn.net/download/iamqianrenzhan/10246989
————————————————
版权声明:本文为CSDN博主「仟人斩」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/iamqianrenzhan/article/details/79266424
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





